Giáo án điện tử chuyên đề Khoa học máy tính 10 cánh diều Bài 4: Thực hành lắp ráp các bộ phận của robot giáo dục
Tải giáo án điện tử Chuyên đề học tập Tin học 10 - Khoa học máy tính (cánh diều) Bài 4: Thực hành lắp ráp các bộ phận của robot giáo dục. Bộ giáo án chuyên đề được thiết kế sinh động, đẹp mắt. Thao tác tải về đơn giản, dễ dàng sử dụng và chỉnh sửa. Thầy, cô kéo xuống để xem chi tiết.
Xem: => Giáo án tin học 10 cánh diều (bản word)



Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Khoa học máy tính Cánh diều
VUI MỪNG CHÀO ĐÓN CÁC BẠN ĐẾN VỚI BÀI HỌC MỚI!
KHỞI ĐỘNG
Em đã biết robot được cấu tạo từ rất nhiều bộ phận, linh kiện, phụ kiện. Làm thế nào để lắp ráp hoàn chỉnh một bộ robot chính xác và nhanh nhất?
BÀI 4: THỰC HÀNH LẮP RÁP CÁC BỘ PHẬN CỦA ROBOT GIÁO DỤC
NỘI DUNG BÀI HỌC
Chuẩn bị các linh kiện, phụ kiện
01
Lắp ráp robot
02
CHUẨN BỊ CÁC LINH KIỆN, PHỤ KIỆN
01
ROBOT
THẢO LUẬN NHÓM
Nhóm 1
Tìm hiểu khái niệm chung về chương trình điều khiển robot.
Nhóm 2
Tìm hiểu một số phần mềm lập trình điều khiển robot.
Chuẩn bị các linh kiện, phụ kiện theo bảng 1
| STT | Tên (Số lượng) | Hình ảnh | STT | Tên (Số lượng) | Hình ảnh |
| 1 | Khung cơ khí (1) | 2 | Giá đỡ cảm biến siêu âm (1 bộ) | ||
| 3 | Khung tay gấp (1) | 4 | Giá giữ động cơ (4) | ||
| 5 | Cọc nhựa (4) | 6 | Vòng đệm (10) | ||
| 7 | Tua vít (1) | 8 | Bánh xe (2) | ||
| 9 | Bánh đa hướng (1) | 10 | Breadboard (1) | ||
| 11 | Đế 6 pin AA (1) | 12 | Bu lông, đai ốc M3 x 30 mm (4 bộ) | ||
| 13 | Bu lông, đai ốc M3 x 12 mm (24 bộ) | 14 | Pin AA 1,5V (6) | ||
| 15 | Mạch Arduino (1) | 16 | Mạch điều khiển động cơ L298 (1) |
| STT | Tên (Số lượng) | Hình ảnh | STT | Tên (Số lượng) | Hình ảnh |
| 17 | Động cơ giảm tốc (2) | 18 | Cảm biến siêu âm (1) | ||
| 19 | Mạch cảm biến hồng ngọại (2) | 20 | Mô đun bluetooth (1) | ||
| 21 | Mô đun Wi-Fi ESP8266 (1) | 22 | Động cơ Servo (2) | ||
| 23 | Đèn LED (5) | 24 | Còi chíp (1) | ||
| 25 | 26 | Dây cáp USB (1) | |||
| 27 | Bộ dây jump kết nối đực đực 20 cm (1) | 28 | Bộ dây jump kết nối đực cái 20 cm (1) | ||
| 29 | Bộ dây jump kết nối đực cái 10 cm (1) | 30 | Bộ dây jump kết nối đực đực 10 cm (1) |
Kiểm tra các linh kiện, phụ kiện đúng và đủ theo danh sách ở trên
LẮP RÁP ROBOT
02
THẢO LUẬN NHÓM
- Em hãy nêu quy trình lắp ráp robot.
- Quan sát sơ đồ nguyên lí và bảng nối dây mạch điện cơ bản cho robot, hãy giải thích theo ý hiểu của em.
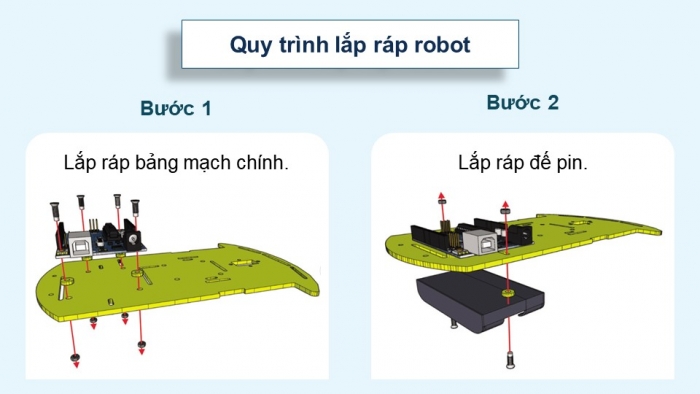
Quy trình lắp ráp robot
Lắp ráp bảng mạch chính.
Bước 1
Lắp ráp đế pin.
Bước 2
Quy trình lắp ráp robot
Lắp ráp mạch điều khiển động cơ.
Bước 3
Lắp ráp bánh đa hướng.
Bước 4
Quy trình lắp ráp robot
Lắp ráp động cơ và bánh xe.
Bước 5
Lắp ráp cụm tay gắp.
Bước 6
Quy trình lắp ráp robot
Lắp ráp cụm tay gắp vào robot.
Bước 7
Lắp ráp cảm biến hồng ngoại vào robot.
Bước 8
Quy trình lắp ráp robot
Lắp ráp cụm cảm biến siêu âm cho robot.
Bước 9
Kết nối mạch điện cho robot.
Bước 10
VẬN DỤNG
Sử dụng robot (Hình 12) thay đổi kết nối chân của mạch điều khiển động cơ L298 với mạch Arduino để robot di chuyển tiến; tương tự, để robot di chuyển lùi, quay trái, quay phải. Biết các chân số (từ 0 đến 9) của Arduino khi chưa có chương trình mặc định sẽ không xác định được mức điện áp. Có thể sử dụng các chân 5V, GDN của mạch Arduino để cấp mức điện áp xác định cho các chân IN1, IN2, IN3, IN4 của mạch L298.
Hình 12. Robot Arduino hoàn chỉnh sau lắp ráp
--------------- Còn tiếp ---------------
Trên chỉ là 1 phần của giáo án. Giáo án khi tải về có đầy đủ nội dung của bài. Đủ nội dung của học kì I + học kì II
Đủ kho tài liệu môn học
=> Tài liệu sẽ được gửi ngay và luôn
Cách tải:
- Bước 1: Chuyển phí vào STK: 1214136868686 - cty Fidutech - MB
- Bước 2: Nhắn tin tới Zalo Fidutech - nhấn vào đây để thông báo và nhận tài liệu
Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Khoa học máy tính Cánh diều