Giáo án điện tử chuyên đề Khoa học máy tính 10 kết nối Bài 14: Thực hành Dự án điều khiển robot trên sa bàn
Tải giáo án điện tử Chuyên đề học tập Tin học 10 - Khoa học máy tính (kết nối tri thức) Bài 14: Thực hành Dự án điều khiển robot trên sa bàn. Bộ giáo án chuyên đề được thiết kế sinh động, đẹp mắt. Thao tác tải về đơn giản, dễ dàng sử dụng và chỉnh sửa. Thầy, cô kéo xuống để xem chi tiết.
Xem: => Giáo án tin học 10 kết nối tri thức (bản word)



Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Định hướng Khoa học máy tính Kết nối tri thức
CHÀO MỪNG CÁC BẠN ĐẾN VỚI TIẾT HỌC MỚI!
KHỞI ĐỘNG
ROBOT HAM HỌC
Câu 1. Ý nào sau đây đúng về quy định lắp ráp các động cơ?
A. Động cơ lắp bên trái được kết nối với cổng M2.
B. Động cơ lắp bên phải được kết nối với cổng M1.
C. Động cơ lắp bên trái được kết nối với cổng M1.
D. Đáp án khác.
Câu 2. Ý nào sau đây chỉ đặc điểm của tham số tốc độ trong câu lệnh điều khiển động cơ DC?
- Nhận một giá trị
B. Nhận một trong hai
giá trị "tiến" hoặc "lùi".
C. Nhận giá trị nguyên
là 255.
D. Đáp án khác.
Câu 3. Nếu bề mặt phản xạ màu sáng, mỗi mắt của cảm biến dò đường của robot sẽ nhận giá trị tín hiệu
A. Bằng 0.
B. Bằng 1.
C. Bằng 2.
D. Đáp án khác.
Câu 4. Câu lệnh Bật còi tương ứng với điện áp như thế nào?
A. Mức điện áp thấp nhất hoặc ngừng cung cấp điện áp.
B. Mức điện áp cao nhất.
C. Mức điện áp bằng 255.
D. Đáp án khác
Câu 5. Có bao nhiêu trường hợp các tổ hợp giá trị nhận tín hiệu từ cảm biến dò đường bốn mắt?
A. 2.
B. 4.
C. 8.
D. 16.
BÀI 14 – THỰC HÀNH: DỰ ÁN ĐIỀU KHIỂN ROBOT TRÊN SA BÀN
NỘI DUNG BÀI HỌC
Thiết kế, lập trình mô hình robot vận chuyển hàng hóa, tự động dừng lại và bật còi báo hiệu khi gặp vật cản
01
Lập trình robot dọn dẹp vật cản sau khi bật còi báo hiệu và tiếp tục vận chuyển hàng hóa
02
Lập trình robot dừng lại tại vị trí kết thúc khi vận chuyển hàng hóa thành công và phát các nốt nhạc
03
01
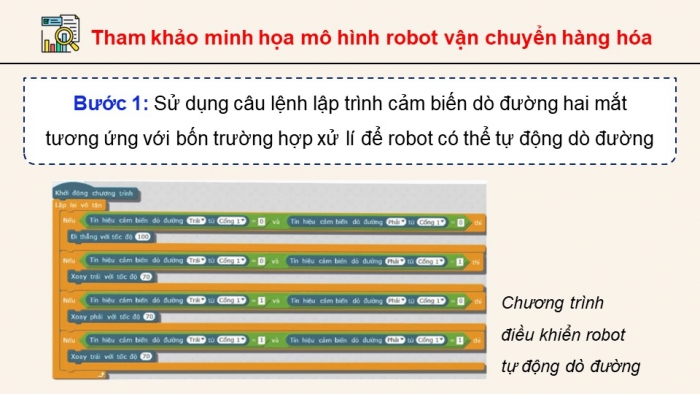
Tham khảo minh họa mô hình robot vận chuyển hàng hóa
Bước 1: Sử dụng câu lệnh lập trình cảm biến dò đường hai mắt
tương ứng với bốn trường hợp xử lí để robot có thể tự động dò đường
Chương trình
điều khiển robot tự động dò đường
Tham khảo minh họa mô hình robot vận chuyển hàng hóa
Bước 2: Sử dụng câu lệnh lập trình cảm biến siêu âm
để robot có thể phát hiện vật cản trên sa bàn.
Chương trình điều khiển robot tự động dừng lại khi gặp vật cản
Tham khảo minh họa mô hình robot vận chuyển hàng hóa
Bước 3: Sử dụng câu lệnh điều khiển còi báo động.
Chương trình
điều khiển bật, tắt còi báo động khi robot gặp vật cản
Tham khảo minh họa mô hình robot vận chuyển hàng hóa
Bước 4: Kết hợp các chương trình ở các bước 1, 2, 3.
Chương trình hoàn thiện để robot thực hiện nhiệm vụ 1
Tham khảo minh họa mô hình robot vận chuyển hàng hóa
Bước 5: Kết nối robot với máy tính và nạp chương trình đã lập vào robot.
Bước 6:
- Đặt robot vào đường đã có trên sa bàn sao cho cả hai mắt của cảm biến dò đường đều nằm trên vùng màu đen.
- Bấm nút chuyển đến chế độ lập trình với máy tính trên mạch điều khiển của robot.
02
Tham khảo minh họa mô hình robot dọn dẹp vật cản
Bước 1: Sử dụng lại chương trình ở Hình 14.3 và bổ sung thêm câu lệnh xoay động cơ servo vào phía sau câu lệnh khởi động chương trình.
Chương trình
điều khiển robot sử dụng động cơ servo làm cơ cấu dọn dẹp vật cản
Tham khảo minh họa mô hình robot dọn dẹp vật cản
Bước 2:
Viết chương trình điều khiển động cơ servo gạt vật cản ra khỏi sa bàn.
Chương trình điều khiển động cơ servo gạt vật cản ra khỏi sa bàn
Tham khảo minh họa mô hình robot dọn dẹp vật cản
Bước 3:
Kết hợp các chương trình ở bước 1 và 2.
Chương trình hoàn chỉnh để robot thực hiện nhiệm vụ 2
Bước 4:
Nạp chương trình vào robot,
cho robot hoạt động trên sa bàn.
03
Tham khảo minh họa lập trình thực tế trên phần mềm GaraBlock
Bước 1:
Hiệu chỉnh lại chương trình ở Hình 14.8: thay đổi câu lệnh xoay trái với tốc độ (70) ở trường hợp 4 thành câu lệnh dừng lại và bổ sung thêm câu lệnh phát nốt nhạc.
Chương trình minh họa
Tham khảo minh họa lập trình thực tế trên phần mềm GaraBlock
Bước 2:
Kết hợp chương trình ở bước 1 và chương trình ở Hình 14.9, ta có chương trình hoàn chỉnh.
Chương trình hoàn thiện
Bước 3:
Nạp chương trình vào robot,
cho robot hoạt động trên sa bàn.
LUYỆN TẬP
Em hãy hiệu chỉnh lại chương trình của nhiệm vụ 1 để robot gặp vật cản thì dừng lại, bật còi và đổi màu đèn LED báo hiệu.
Chương trình tương tự chương trình của nhiệm vụ 1, chỉ cần thêm hai câu lệnh bật/tắt đèn LED với màu bất kì ở hai cổng kết nối khác nhau, đặt phía sau câu lệnh bật còi khi phát hiện vật cản.
VẬN DỤNG
--------------- Còn tiếp ---------------
Trên chỉ là 1 phần của giáo án. Giáo án khi tải về có đầy đủ nội dung của bài. Đủ nội dung của học kì I + học kì II
Đủ kho tài liệu môn học
=> Tài liệu sẽ được gửi ngay và luôn
Cách tải:
- Bước 1: Chuyển phí vào STK: 1214136868686 - cty Fidutech - MB
- Bước 2: Nhắn tin tới Zalo Fidutech - nhấn vào đây để thông báo và nhận tài liệu
Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Định hướng Khoa học máy tính Kết nối tri thức