Giáo án điện tử chuyên đề Khoa học máy tính 10 kết nối Bài 2: Bảng mạch điều khiển và cơ cấu chấp hành
Tải giáo án điện tử Chuyên đề học tập Tin học 10 - Khoa học máy tính (kết nối tri thức) Bài 2: Bảng mạch điều khiển và cơ cấu chấp hành. Bộ giáo án chuyên đề được thiết kế sinh động, đẹp mắt. Thao tác tải về đơn giản, dễ dàng sử dụng và chỉnh sửa. Thầy, cô kéo xuống để xem chi tiết.
Xem: => Giáo án tin học 10 kết nối tri thức (bản word)



Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Định hướng Khoa học máy tính Kết nối tri thức
CHÀO MỪNG CÁC BẠN ĐẾN VỚI TIẾT HỌC MỚI!
KHỞI ĐỘNG
Hình 2.1.
Hai mẫu robot được sử dụng để giảng dạy và thực hành
THẢO LUẬN NHÓM: Các em hãy thảo luận để tìm hiểu vai trò của bảng mạch điện tử đối với robot.
BÀI 2
BẢNG MẠCH
ĐIỀU KHIỂN VÀ
CƠ CẤU CHẤP HÀNH
NỘI DUNG BÀI HỌC
Bảng mạch điều khiển
01
Động cơ – cơ cấu chấp hành chính trong robot
02
BẢNG MẠCH ĐIỀU KHIỂN
a. Bảng mạch điều khiển là gì?
Bộ phận nào là quan trọng nhất chi phối mọi hoạt động của robot?
Bảng mạch điều khiển là bộ phận quan trọng nhất chi phối mọi hoạt động của robot.
THẢO LUẬN NHÓM
Nhóm 1
Nêu khái niệm, chức năng của bảng mạch điều khiển.
Nhóm 2
Trình bày nguyên lí hoạt động của bảng mạch điều khiển.
Nhóm 3
Kể tên các linh kiện cơ bản của bảng mạch điện tử và kiểu nối thường gặp của các linh kiện đó.
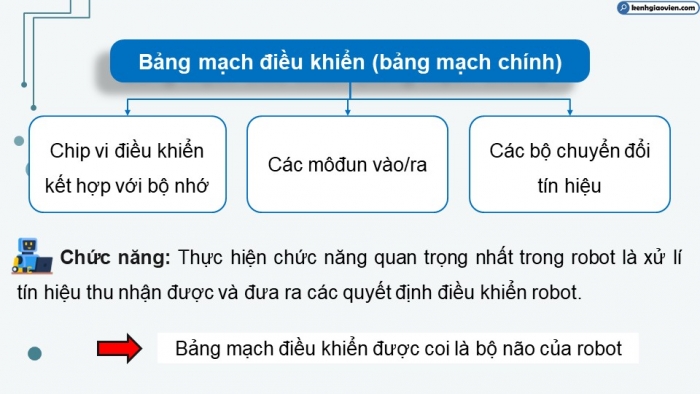
Bảng mạch điều khiển (bảng mạch chính)
Chip vi điều khiển kết hợp với bộ nhớ
Các môđun vào/ra
Các bộ chuyển đổi tín hiệu
Chức năng: Thực hiện chức năng quan trọng nhất trong robot là xử lí tín hiệu thu nhận được và đưa ra các quyết định điều khiển robot.
Bảng mạch điều khiển được coi là bộ não của robot
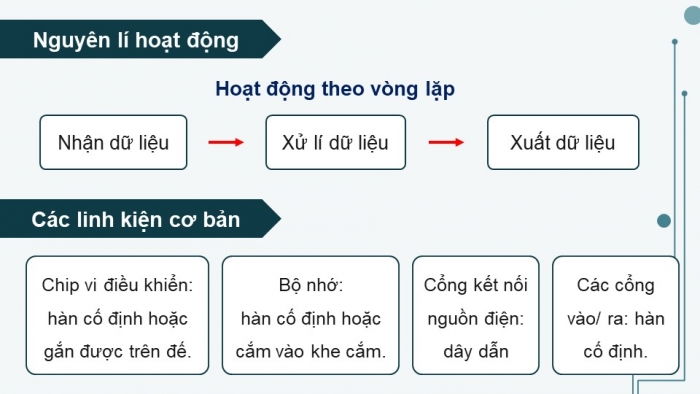
Nguyên lí hoạt động
Nhận dữ liệu
Hoạt động theo vòng lặp
Xử lí dữ liệu
Xuất dữ liệu
Các linh kiện cơ bản
Chip vi điều khiển: hàn cố định hoặc gắn được trên đế.
Bộ nhớ:
hàn cố định hoặc cắm vào khe cắm.
Cổng kết nối nguồn điện: dây dẫn
Các cổng vào/ ra: hàn cố định.
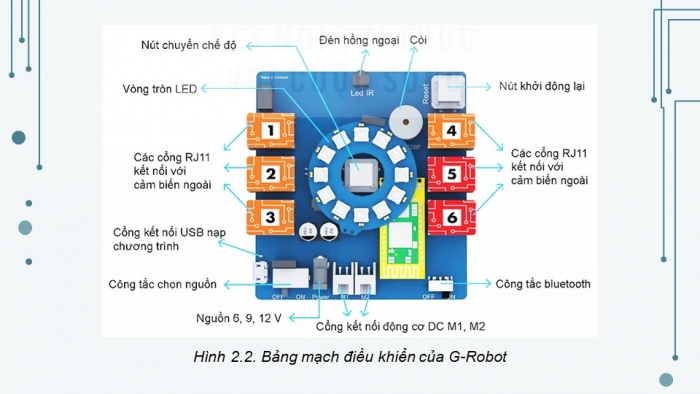
b. Bảng mạch điều khiển trong robot
Hãy tìm hiểu bảng
mạch điều khiển được sử dụng trong G-Robot.
Hình 2.2. Bảng mạch điều khiển của G-Robot
Bảng mạch điều khiển của G-Robot được thiết kế dựa trên nền tảng thiết kế mở. Do đó có thể dễ dàng kết nối với các cảm biến hay các cơ cấu chấp hành và phụ kiện tiếp nhận điều khiển một cách dễ dàng, phù hợp trong môi trường giáo dục.
ĐỘNG CƠ – CƠ CẤU CHẤP HÀNH CHÍNH TRONG ROBOT
a. Một số loại động cơ robot
Thảo luận để tìm hiểu về sự khác nhau giữa hai loại động cơ này.
Hình 2.3. Động cơ DC và bánh xe giúp robot di chuyển
Hình 2.4. Động cơ servo và cánh tay máy gắp đồ vật
Động cơ DC:
là loại động cơ điện 1 chiều để thực hiện các chuyển động với vận tốc không đổi trong những khoảng thời gian xác định.
Động cơ servo:
- Có khả nảng phản hồi vị trí cuối cùng của trục quay.
- Trong robot, động cơ servo thường dùng để điều khiển các cử động nâng, hạ đến vị trí thích hợp.
b. Kết nối động cơ với robot
Em hãy nêu các bước kết nối động cơ DC với robot
Hình 2.5. Sơ đồ kết nối động cơ DC vào bảng mạch
Hình 2.6. Sơ đồ kết nối động cơ servo với robot
Các bước kết nối động cơ DC (M1, M2) với robot
Kết nối robot với nguồn điện.
Kết nối các động cơ DC M1, M2 với các cổng M1, M2.
Nạp lệnh điều khiển robot đi thẳng và kiểm tra hoạt động của động cơ DC M1, M2 bằng cách quan sát hai động cơ xoay cùng chiều.
Các bước kết nối động cơ servo với robot
Kết nối robot với nguồn điện.
Kết nối các động cơ servo với cổng giao tiếp mở rộng bằng dây nối chuẩn RJxx.
Nạp lệnh điều khiển động cơ servo xoay các góc 0o, 90o, 180o và kiểm tra hoạt động của động cơ servo bằng cách quan sát góc quay của động cơ servo.
THẢO LUẬN NHÓM
Câu 1. Vì sao các bảng mạch của robot thường có hai cổng kết nối động cơ DC?
Câu 2. Vì sao các robot lại thường
có hai cổng kết nối động cơ servo?
LUYỆN TẬP
Câu 1: Tại sao lại gọi bảng mạch điều khiển là bộ não của robot?
Câu 2: Nếu chúng ta lắp động cơ bên trái vào cổng M2, động cơ bên phải vào cổng M1 thì lắp đúng hay sai? Giải thích lí do.
Gợi ý
Câu 1
Vì bảng mạch điều khiển đóng vai trò tiếp nhận các dữ liệu, xử lí và điều khiển các cơ cấu chấp hành dựa trên kết quả xử lí.
Câu 2
Lắp sai, robot sẽ chuyển động ngược lại với các lệnh điều khiển do vị trí động cơ bị lắp ngược. Ví dụ: robot sẽ đi lùi nếu nhận lệnh đi thẳng.
VẬN DỤNG
Câu 1: Nếu robot sử dụng đèn pin để chạy động cơ DC, theo em khi nguồn điện của pin xuống thấp thì công suất của động cơ DC có bị ảnh hưởng không?
Câu 2: Truy cập Internet để tìm hiểu một số thông tin chính liên quan tới các bảng mạch điều khiển của Adruino và Microbit (vài nét về lịch sử hình thành; mục đích sử dụng; ngôn ngữ lập trình dùng cho bảng mạch đó...)
Gợi ý câu 1
--------------- Còn tiếp ---------------
Trên chỉ là 1 phần của giáo án. Giáo án khi tải về có đầy đủ nội dung của bài. Đủ nội dung của học kì I + học kì II
Đủ kho tài liệu môn học
=> Tài liệu sẽ được gửi ngay và luôn
Cách tải:
- Bước 1: Chuyển phí vào STK: 1214136868686 - cty Fidutech - MB
- Bước 2: Nhắn tin tới Zalo Fidutech - nhấn vào đây để thông báo và nhận tài liệu
Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Định hướng Khoa học máy tính Kết nối tri thức