Giáo án điện tử chuyên đề Khoa học máy tính 10 kết nối Bài 3: Cảm biến và phụ kiện dùng trong robot
Tải giáo án điện tử Chuyên đề học tập Tin học 10 - Khoa học máy tính (kết nối tri thức) Bài 3: Cảm biến và phụ kiện dùng trong robot. Bộ giáo án chuyên đề được thiết kế sinh động, đẹp mắt. Thao tác tải về đơn giản, dễ dàng sử dụng và chỉnh sửa. Thầy, cô kéo xuống để xem chi tiết.
Xem: => Giáo án tin học 10 kết nối tri thức (bản word)


Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Định hướng Khoa học máy tính Kết nối tri thức
NHIỆT LIỆT CHÀO MỪNG CÁC BẠN ĐẾN VỚI BÀI HỌC MỚI MÔN TIN HỌC!
KHỞI ĐỘNG
Dịch vụ thương mại điện tử hàng đầu thế giới của công ty Amazon
đã sử dụng robot để sắp xếp, vận chuyển hàng hóa trong kho
Em có biết bằng cách nào hàng trăm con robot có thể di chuyển mà không va chạm vào nhau?
BÀI 3: CẢM BIẾN VÀ PHỤ KIỆN DÙNG TRONG ROBOT
01
a. Cảm biến dò đường
Đọc thông tin SGK tr.15 và trả lời câu hỏi
- Chỉ ra bộ phận quan trọng nhất của cảm biến dò đường.
- Nêu cấu tạo của mắt hồng ngoại.
- Trình bày nguyên lí hoạt động chính của cảm biến dò đường.
- Nguyên tắc thiết lập đường đi trên sa bàn cho robot dò đường là gì?
a. Cảm biến dò đường
Mắt hồng ngoại là bộ phận quan trọng nhất trong mỗi cảm biến dò đường.
Mỗi mắt hồng ngoại được cấu tạo gồm một cặp đầu thu/ phát tín hiệu hồng ngoại đặt cạnh nhau nhìn về cùng một hướng.
Nguyên lí hoạt động
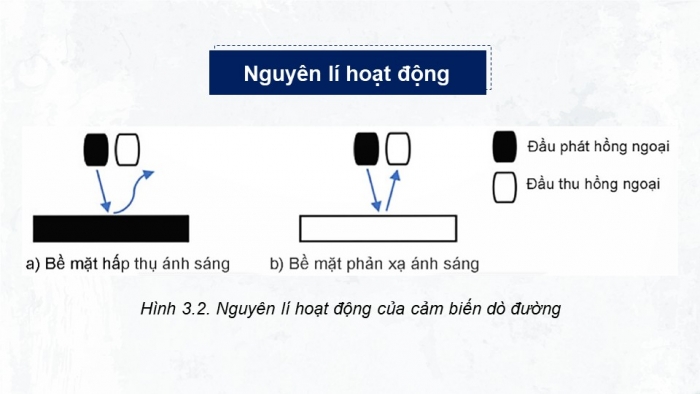
Nếu đầu thu không thu được tín hiệu của đầu phát, do vùng đối diện là vùng tối hấp thụ hầu hết các tia hồng ngoại chiếu vào, ta quy ước giá trị tín hiệu của mắt bằng 0.
Ngược lại, khi đầu thu thu được tín hiệu của đầu phát do vùng đối diện là vùng sáng phản xạ hầu hết các tia hồng ngoại chiếu vào, ta quy ước giá trị tín hiệu của mắt bằng 1.
Hình 3.2. Nguyên lí hoạt động của cảm biến dò đường
Nguyên lí hoạt động
Nguyên lí thiết lập đường đi
Nếu tín hiệu trả về của cả hai mắt bằng 0, em tiếp tục cho robot di chuyển thẳng dọc theo đường đi.
Khi tín hiệu trả về của một trong hai mắt bằng 1, nghĩa là robot bắt dầu di chuyển chệch khỏi đường đi, em cần điều khiển để robot rẽ sang phía mắt có tín hiệu bằng 0.
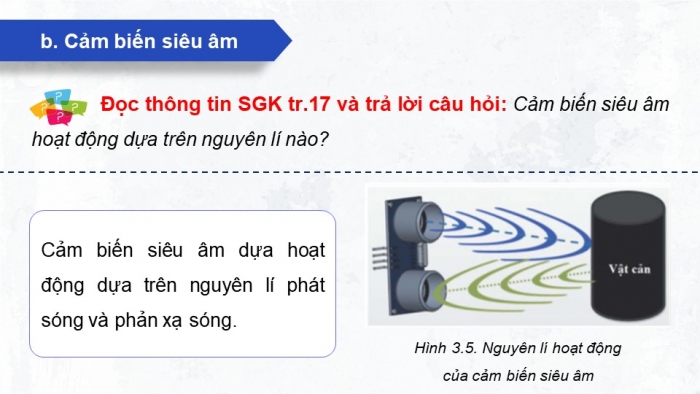
b. Cảm biến siêu âm
Đọc thông tin SGK tr.17 và trả lời câu hỏi: Cảm biến siêu âm hoạt động dựa trên nguyên lí nào?
Cảm biến siêu âm dựa hoạt động dựa trên nguyên lí phát sóng và phản xạ sóng.
Hình 3.5. Nguyên lí hoạt động của cảm biến siêu âm
THẢO LUẬN NHÓM
Câu 1. Vì sao cảm biến siêu âm
phải đặt phía trước robot tự hành?
Câu 2. Em hãy tìm một vài ứng dụng của cảm biến siêu âm và cảm biến dò đường trong các mô hình robot khác.
Ứng dụng cảm biến dò đường trong thực tế
Xe tự hành có thể dò đường
và di chuyển theo cảm biến laser
Robot lau nhà
Ứng dụng cảm biến siêu âm trong thực tế
Cảm biến siêu âm trong đỗ xe
Cảm biến siêu âm
trong công nghiệp
c. Kết nối cảm biến siêu âm và cảm biến dò đường với robot
Tùy thuộc vào từng loại robot chúng ta có thể kết nối các cảm biến này vào các cổng loại RJxx.
Hình 3.7. Kết nối cảm biến với bảng mạch điều khiển
02
Đọc thông tin SGK tr.17 - 18 và cho biết: Em hãy cho biết robot dùng những phương pháp nào để thông báo cho người sử dụng.
Robot đưa tín hiệu ra các các cơ cấu chấp hành
Còi
Đèn LED
Màn hình
Vi điều khiển từ xa
Còi
Là phụ kiện phát ra âm thanh, sử dụng điện áp để chuyển đổi tín hiệu điện thành âm thanh.
Được dùng phổ biến trong robot và thường được lắp đặt cố định trên bảng mạch điều khiển.
Hình 3.8. Còi trên một bảng mạch điều khiển của robot
Đèn LED
- Là cơ cấu chuyển đổi tín hiệu thành ánh sáng.
- Đèn LED có thể được gắn sẵn trên bảng mạch điều khiển của robot hoặc kết nối rời thông qua các cổng giao tiếp.
Hình 3.10. Đèn LED được gắn sẵn trên bảng mạch điều khiển của robot
Màn hình
Là phương tiện không thể thiếu trong giao tiếp người – máy nói chung.
Màn hình được kết nối riêng biệt thông qua cổng giao tiếp và thường được dung để hiển thị các thông tin như: nhiệt độ, độ ẩm,… hoặc các thông báo ngắn trong quá trình robot hoạt động.
Hình 3.11. Màn hình
Vi điều khiển từ xa
- Là một loại phụ kiện thường dùng cho robot.
- Thường sử dụng tia hồng ngoại hoặc phát tín hiệu sóng điện từ Bluetooth để điều khiển robot từ xa mà không cần tiếp xúc với robot.
Hình 3.12. Vỉ điều khiển từ xa
Nếu robot được trang bị cảm biến nhiệt độ và độ ẩm không khí thì dữ liệu đo được bởi các cảm biến này có thể được hiển thị ở đâu.
LUYỆN TẬP
Câu 1: Để điều khiển robot di chuyển theo một đường thẳng đã được vạch sẵn thì cần dùng cảm biến hay cơ cấu chấp hành nào?
A. Cảm biến siêu âm
B. Cảm biến dò đường
C. Động cơ DC
Câu 2: Robot sử dụng những phụ kiện tiếp nhận điều khiển nào để chuyển tải các thông tin âm thanh, hình ảnh?
Còi
Màn hình
VẬN DỤNG
--------------- Còn tiếp ---------------
Trên chỉ là 1 phần của giáo án. Giáo án khi tải về có đầy đủ nội dung của bài. Đủ nội dung của học kì I + học kì II
Đủ kho tài liệu môn học
=> Tài liệu sẽ được gửi ngay và luôn
Cách tải:
- Bước 1: Chuyển phí vào STK: 1214136868686 - cty Fidutech - MB
- Bước 2: Nhắn tin tới Zalo Fidutech - nhấn vào đây để thông báo và nhận tài liệu
Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Định hướng Khoa học máy tính Kết nối tri thức