Giáo án chuyên đề Tin học 10 theo định hướng khoa học máy tính kết nối tri thức
Giáo án giảng dạy theo bộ sách chuyên đề học tập định hướng khoa học máy tính bộ sách Kết nối tri thức với cuộc sống. Bộ giáo án giúp giáo viên hướng dẫn học sinh mở rộng kiến thức sinh học phổ thông, phát triển năng lực, nâng cao khả năng định hướng nghệ nghiệp cho các em sau này. Thao tác tải về rất đơn giản, tài liệu file word có thể chỉnh sửa dễ dàng, mời quý thầy cô tham khảo bài demo.
Bản xem trước: Giáo án chuyên đề Tin học 10 theo định hướng khoa học máy tính kết nối tri thức
Một số tài liệu quan tâm khác
Phần trình bày nội dung giáo án
Ngày soạn:…/…/…
Ngày dạy:…/…/…
CHUYÊN ĐỀ 3: LẬP TRÌNH ĐIỀU KHIỂN RÔ-BỐT
BÀI 9: PHẦN MỀM ĐIỀU KHIỂN RÔ-BỐT CHUYỂN ĐỘNG
- MỤC TIÊU
- Về kiến thức
Sau bài học này, HS sẽ:
- Biết các lệnh điều khiển động cơ DC và động cơ servo của rô-bốt.
- Biết và lập trình điều khiển được rô-bốt chuyển động cánh tay.
- Năng lực
- Năng lực chung:
- Giải quyết được những nhiệm vụ học tập một cách độc lập, theo nhóm và thể hiện sự sáng tạo.
- Góp phần phát triển năng lực giao tiếp và hợp tác qua hoạt động nhóm và trao đổi công việc với giáo viên.
- Năng lực riêng:
- HS cần trả lời các câu hỏi của phần củng cố, phần luyện tập và viết chương trình lập mở rộng ở phần vận dụng.
- Trong quá trình thực hiện các yêu cầu, HS được phát triển năng lực giải quyết vấn đề và kĩ năng lập trình cảm biến siêu âm.
- Phẩm chất
- HS có thái độ tự giác, hợp tác khi thảo luận nội dung bài học.
- HS trung thực, hoàn thành đầy đủ bài tập.
- THIẾT BỊ DẠY HỌC VÀ HỌC LIỆU
- Đối với giáo viên
- SGK, Sách chuyên đề học tập Định hướng khoa học máy tính 10, SGV, Kế hoạch bài dạy.
- Một mô hình rô-bốt mẫu đã lắp ráp sẵn để minh họa cụ thể phần lí thuyết về động cơ giúp HS tiếp nhận kiến thức dễ dàng.
- Lập trình hoàn thiện chương trình kéo thả như ví dụ minh họa trong gợi ý hoạt động dưới đây để dễ dàng minh họa và giải thích nguyên lí hoạt động của động cơ rô-bốt.
- Một động cơ servo để minh họa cụ thể phần lí thuyết giúp HS tiếp nhận kiến thức dễ dàng hơn.
- Lập tình hoàn thiện chương trình kéo thả như ví dụ minh họa trong Phần 2, mục b để dễ dàng minh họa và giải thích nguyên lí hoạt động của mô hình cánh tay rô-bốt 2 bậc.
- Máy tính, máy chiếu (nếu có).
- Đối với học sinh
Sách chuyên đề học tập Định hướng khoa học máy tính 10.
III. TIẾN TRÌNH DẠY HỌC
- HOẠT ĐỘNG KHỞI ĐỘNG
- Mục tiêu: Gợi mở cho HS biết nguyên lí chuyển động của rô-bốt và cách sử dụng cánh tay rô-bốt trong thực tế.
- Nội dung: GV đặt câu hỏi; HS trả lời.
- Sản phẩm học tập: Câu trả lời của HS về cách mà rô-bốt có thể chuyển động được, cách để rô-bốt tiếp tục đi thẳng về phía trước ngay cả khi có vật cản.
- Tổ chức thực hiện:
- GV yêu cầu HS thảo luận theo cặp đôi và trả lời câu hỏi: Em hãy cho biết
+ Làm thế nào mà rô-bốt có thể chuyển động được?
+ Làm thế nào để rô-bốt tiếp tục đi thẳng về phía trước khi có vật cản ở ngay phía trước?
- HS tiếp nhận, thực hiện nhiệm vụ:
+ Rô-bốt chuyển động được nhờ vào việc điều khiển chuyển động của các động cơ.
+ Khi có vật cản xuất hiện phía trước rô-bốt, rô-bốt có thể sử dụng cơ chế của cánh tay rô-bốt để gắp vật cản sang một bên và tiếp tục di chuyển thẳng về phía trước.
- GV nhận xét, đánh giá.
- GV dẫn dắt HS vào bài học: Trong các nhà máy, người ta sử dụng cánh tay rô-bốt để thực hiện một số công đoạn trong sản xuất thay cho con người. Vậy, cơ chế điều khiển cánh tay rô-bốt là gì? Để biết các lệnh điều khiển động cơ DC và động cơ servo của rô-bốt, cũng như biết và lập trình điều khiển được rô-bốt chuyển động cánh tay, chúng ta sẽ cùng nhau đi tìm hiểu trong bài học ngày hôm nay – Bài 9: Phần mềm điều khiển rô-bốt chuyển động.
- HOẠT ĐỘNG HÌNH THÀNH KIẾN THỨC
- LẬP TRÌNH ĐIỀU KHIỂN ĐỘNG CƠ DC
Hoạt động 1: Tìm hiểu các lệnh điều khiển động cơ DC
- Mục tiêu: Thông qua hoạt động, HS nắm được các lệnh điều khiển động cơ DC, các lệnh điều khiển rô-bốt chuyển động và các câu lệnh lập trình tích hợp điều khiển rô-bốt chuyển động.
- Nội dung: GV trình bày vấn đề; HS đọc thông tin Sách CĐHT, quan sát hình ảnh, thảo luân và trả lời câu hỏi.
- Sản phẩm học tập: HS ghi được vào vở:
- Các câu lệnh điều khiển động cơ DC.
- Các lệnh điều khiển đồng thời cả hai động cơ DC M1 và M2.
- Các câu lệnh lập trình tích hợp điều khiển rô-bốt chuyển động.
- Tổ chức hoạt động:
HOẠT ĐỘNG CỦA GIÁO VIÊN - HỌC SINH | DỰ KIẾN SẢN PHẨM |
Bước 1: GV chuyển giao nhiệm vụ học tập - GV bật nguồn của mô hình rô-bốt đã lắp ráp sẵn như trong hướng dẫn của Bài 4. GV bấm nút chuyển chế độ sang chế độ lập trình. Hoạt động đọc - GV dẫn dắt: Động cơ DC chỉ có hai chiều xoay (1) xoay trừ trái sang phải theo chiều kim đồng hồ (quy ước gọi là chiều tiến). (2) xoay từ phải sang trái ngược chiều kim đồng hồ (chiều lùi).
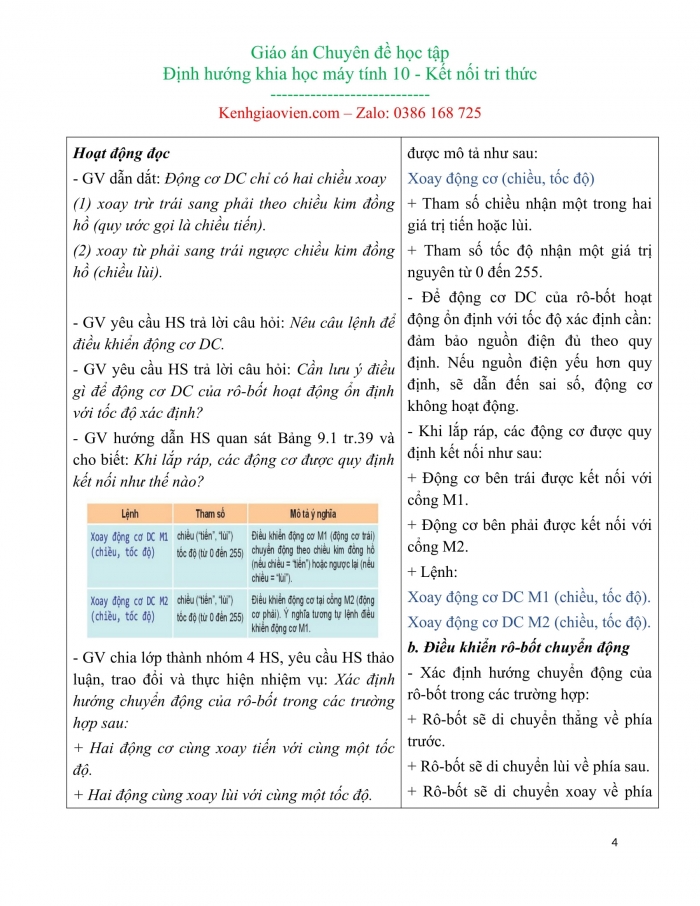
- GV yêu cầu HS trả lời câu hỏi: Nêu câu lệnh để điều khiển động cơ DC. - GV yêu cầu HS trả lời câu hỏi: Cần lưu ý điều gì để động cơ DC của rô-bốt hoạt động ổn định với tốc độ xác định? - GV hướng dẫn HS quan sát Bảng 9.1 tr.39 và cho biết: Khi lắp ráp, các động cơ được quy định kết nối như thế nào? - GV chia lớp thành nhóm 4 HS, yêu cầu HS thảo luận, trao đổi và thực hiện nhiệm vụ: Xác định hướng chuyển động của rô-bốt trong các trường hợp sau: + Hai động cơ cùng xoay tiến với cùng một tốc độ. + Hai động cùng xoay lùi với cùng một tốc độ. + Động cơ M1 bên trái không xoay, động cơ M2 bên phải xoay tiến. + Đông cơ M2 bên phải không xoay, động cơ M1 bên trái xoay tiến. + Cả hai động cơ cùng không xoay. - GV yêu cầu HS: Phân tích các câu lệnh điều khiển đồng thời cả hai động cơ DC M1 và M2.
- GV yêu cầu HS giải thích câu lệnh tích hợp được ghép dựa trên các câu lệnh điều khiển từng động cơ nào?
Hoạt động ghi nhớ kiến thức GV chốt kiến thức cho HS: - Động cơ DC sử dụng điện một chiều do pin cung cấp. Động cơ DC chỉ có hai chiều xoay: chiều từ trái sang phải (tiến) và ngược lại. - Câu lệnh lõi lập trình điều khiển động cơ cần chú ý hai tham số là chiều và tốc độ. Từ đó giúp chúng ta lập trình rô-bốt di chuyển chính xác theo mong muốn của người lập trình. - Câu lệnh lập trình tích hợp của các rô-bốt vận hành trên các câu lệnh lập trình điều khiển động cơ giúp cho việc lập trình rô-bốt được đơn giản và dễ tiếp cận hơn. Bước 2: HS thực hiện nhiệm vụ học tập - HS đọc thông tin Sách CĐHT, quan sát hình ảnh, thảo luân và trả lời câu hỏi. - GV hướng dẫn, hỗ trợ HS (nếu cần thiết). Bước 3: Báo cáo kết quả hoạt động và thảo luận - GV mời đại diện HS trả lời câu hỏi về: + Các câu lệnh điều khiển động cơ DC. + Các lệnh điều khiển đồng thời cả hai động cơ DC M1 và M2. + Các câu lệnh lập trình tích hợp điều khiển rô-bốt chuyển động. - GV mời HS khác nhận xét, bổ sung. Bước 4: Đánh giá kết quả, thực hiện nhiệm vụ học tập GV đánh giá, nhận xét, chuẩn kiến thức, chuyển sang nội dung mới. | 1. Tìm hiểu các lệnh điều khiển động cơ DC a. Các lệnh điều khiển động cơ DC - Câu lệnh để điều khiển động cơ DC được mô tả như sau: Xoay động cơ (chiều, tốc độ) + Tham số chiều nhận một trong hai giá trị tiến hoặc lùi. + Tham số tốc độ nhận một giá trị nguyên từ 0 đến 255. - Để động cơ DC của rô-bốt hoạt động ổn định với tốc độ xác định cần: đảm bảo nguồn điện đủ theo quy định. Nếu nguồn điện yếu hơn quy định, sẽ dẫn đến sai số, động cơ không hoạt động. - Khi lắp ráp, các động cơ được quy định kết nối như sau: + Động cơ bên trái được kết nối với cổng M1. + Động cơ bên phải được kết nối với cổng M2. + Lệnh: Xoay động cơ DC M1 (chiều, tốc độ). Xoay động cơ DC M2 (chiều, tốc độ). b. Điều khiển rô-bốt chuyển động - Xác định hướng chuyển động của rô-bốt trong các trường hợp: + Rô-bốt sẽ di chuyển thẳng về phía trước. + Rô-bốt sẽ di chuyển lùi về phía sau. + Rô-bốt sẽ di chuyển xoay về phía bên trái. + Rô-bốt sẽ di chuyển xoay về phía bên phải. + Rô-bốt sẽ dừng lại. - Các lệnh điều khiển đồng thời cả hai động cơ DC M1 và M2: + Chuyển động thẳng: Xoay động cơ DC M1 (tiến, tốc độ) Xoay động cơ DC M2 (tiến, tốc độ) + Chuyển động lùi: Xoay động cơ DC M1 (lùi, tốc độ) Xoay động cơ DC M2 (lùi, tốc độ) + Điều khiển rô-bốt rẽ trái: · Cho động cơ trái dừng lại, động cơ phải chuyển động tịnh tiến Xoay động cơ DC M1 (tiến, 0) Xoay động cơ DC M2 (tiến, tốc độ) · Cho động cơ trái đi lùi, động cơ phải vẫn chuyển động tiến Xoay động cơ DC M1 (lùi, tốc độ) Xoay động cơ DC M2 (tiến, tốc độ) · Cho cả hai động cơ cùng chuyển động tiến cùng chuyển động tiến nhưng tốc độ của M1 nhỏ hơn tốc độ của M2 Xoay động cơ DC M1 (tiến, tốc độ 1) Xoay động cơ DC M2 (tiến, tốc độ 2) + Điều khiển rô-bốt rẽ phải: tương tự TH rẽ trái. + Điều khiển rô-bốt dừng lại: Xoay động cơ DC M1 (tiến, 0) Xoay động cơ DC M2 (tiến, 0) c. Các câu lệnh lập trình tích hợp điều khiển rô-bốt chuyển động - Cho động cơ trái chuyển động, động cơ phải vẫn dừng lại: Xoay động cơ DC M1 (tiến, tốc độ) Xoay động cơ DC M2 (tiến, 0) - Cho động cơ trái chuyển động, động cơ phải vẫn đi lùi lại: Xoay động cơ DC M1 (tiến, tốc độ) Xoay động cơ DC M2 (lùi, tốc độ) - Cho cả 2 động cơ chuyển động nhưng vận tốc độ cơ M1 nhỏ hơn vận tốc động cơ M2: Xoay động cơ DC M1 (tiến, tốc độ 1) Xoay động cơ DC M2 (tiến, tốc độ 2) |
- LẬP TRÌNH ĐIỀU KHIỂN ĐỘNG CƠ SERVO
Hoạt động 2: Tìm hiểu cách điều khiển động cơ servo
- Mục tiêu: Thông qua hoạt động, HS nắm được cách điều khiển động cơ servo và mô tả đượ mô hình cánh tay rô-bốt điều khiển bởi hai động cơ servo
- Nội dung: GV trình bày vấn đề; HS đọc thông tin Sách CĐHT, quan sát hình ảnh, thảo luân và trả lời câu hỏi.
- Sản phẩm học tập: HS ghi được vào vở
- Chiều xoay, góc xoay và lệnh điều khiển động cơ servo.
- Mô hình cánh tay máy bậc hai.
- Tổ chức hoạt động:
HOẠT ĐỘNG CỦA GIÁO VIÊN - HỌC SINH | DỰ KIẾN SẢN PHẨM |
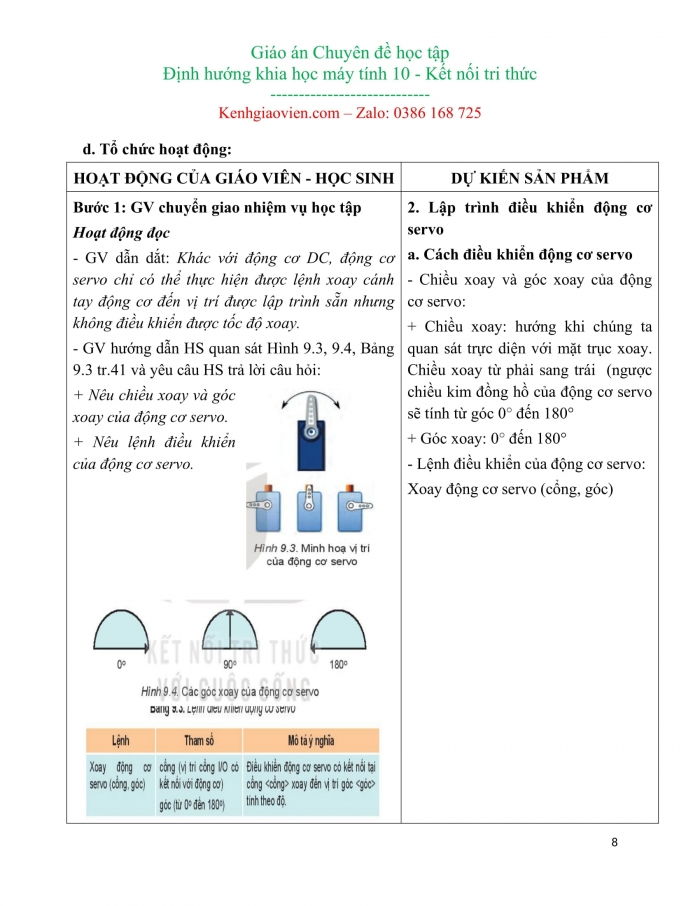
Bước 1: GV chuyển giao nhiệm vụ học tập Hoạt động đọc - GV dẫn dắt: Khác với động cơ DC, động cơ servo chỉ có thể thực hiện được lệnh xoay cánh tay động cơ đến vị trí được lập trình sẵn nhưng không điều khiển được tốc độ xoay. - GV hướng dẫn HS quan sát Hình 9.3, 9.4, Bảng 9.3 tr.41 và yêu câu HS trả lời câu hỏi: + Nêu chiều xoay và góc xoay của động cơ servo. + Nêu lệnh điều khiển của động cơ servo.
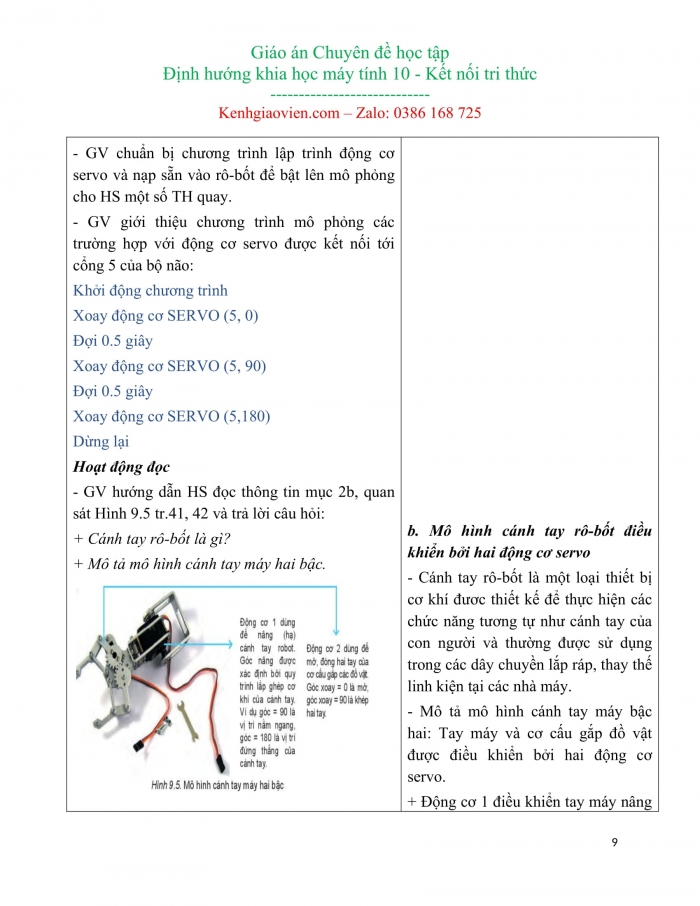
- GV chuẩn bị chương trình lập trình động cơ servo và nạp sẵn vào rô-bốt để bật lên mô phỏng cho HS một số TH quay. - GV giới thiệu chương trình mô phỏng các trường hợp với động cơ servo được kết nối tới cổng 5 của bộ não: Khởi động chương trình Xoay động cơ SERVO (5, 0) Đợi 0.5 giây Xoay động cơ SERVO (5, 90) Đợi 0.5 giây Xoay động cơ SERVO (5,180) Dừng lại Hoạt động đọc - GV hướng dẫn HS đọc thông tin mục 2b, quan sát Hình 9.5 tr.41, 42 và trả lời câu hỏi: + Cánh tay rô-bốt là gì? + Mô tả mô hình cánh tay máy hai bậc.
- GV yêu cầu HS thảo luận theo nhóm và thực hiện nhiệm vụ: Hiệu chỉnh lại chương trình theo yêu cầu: cánh tay rô bốt khởi đầu ở vị trí 150 độ với tay gắp mở. Sau đó hạ tay gắp xuống vị trí 90 độ, đợi 1 giây rồi đóng tay gắp lại. Nâng tay gắp lên một góc 150 độ rồi mở tay gắp ra, đợi 0.5 giây và lặp lại quy trình này 5 lần.
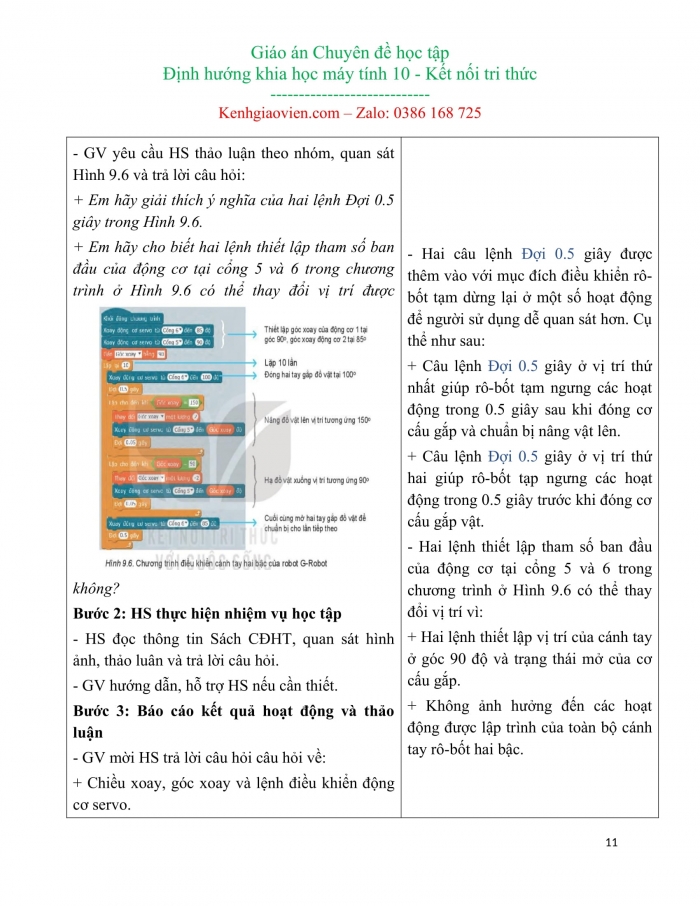
Hoạt động ghi nhớ kiến thức GV kết luận: - Câu lệnh điều khiển động cơ servo có hai tham số bao gồm cổng kết nối và góc. Cổng kết nối để câu lệnh điều khiển đúng động cơ servo đang kết nối với bộ não và góc để xoay cánh quạt servo đến vị trí mong muốn từ 0° đến 180° - Cánh tay rô-bốt bao gồm phần tay máy và cơ cấu gặp, thường được ứng dụng trong nhiều quy trình sản xuất công nghiệp. Hoạt động củng cố kiến thức - GV yêu cầu HS thảo luận theo nhóm, quan sát Hình 9.6 và trả lời câu hỏi: + Em hãy giải thích ý nghĩa của hai lệnh Đợi 0.5 giây trong Hình 9.6. + Em hãy cho biết hai lệnh thiết lập tham số ban đầu của động cơ tại cổng 5 và 6 trong chương trình ở Hình 9.6 có thể thay đổi vị trí được không? Bước 2: HS thực hiện nhiệm vụ học tập - HS đọc thông tin Sách CĐHT, quan sát hình ảnh, thảo luân và trả lời câu hỏi. - GV hướng dẫn, hỗ trợ HS nếu cần thiết. Bước 3: Báo cáo kết quả hoạt động và thảo luận - GV mời HS trả lời câu hỏi câu hỏi về: + Chiều xoay, góc xoay và lệnh điều khiển động cơ servo. + Mô hình cánh tay máy bậc hai. - GV mời HS khác nhận xét, bổ sung. Bước 4: Đánh giá kết quả, thực hiện nhiệm vụ học tập GV đánh giá, nhận xét, chuẩn kiến thức. | 2. Lập trình điều khiển động cơ servo a. Cách điều khiển động cơ servo - Chiều xoay và góc xoay của động cơ servo: + Chiều xoay: hướng khi chúng ta quan sát trực diện với mặt trục xoay. Chiều xoay từ phải sang trái (ngược chiều kim đồng hồ của động cơ servo sẽ tính từ góc 0° đến 180° + Góc xoay: 0° đến 180° - Lệnh điều khiển của động cơ servo: Xoay động cơ servo (cổng, góc)
b. Mô hình cánh tay rô-bốt điều khiển bởi hai động cơ servo - Cánh tay rô-bốt là một loại thiết bị cơ khí đươc thiết kế để thực hiện các chức năng tương tự như cánh tay của con người và thường được sử dụng trong các dây chuyền lắp ráp, thay thế linh kiện tại các nhà máy. - Mô tả mô hình cánh tay máy bậc hai: Tay máy và cơ cấu gắp đồ vật được điều khiển bởi hai động cơ servo. + Động cơ 1 điều khiển tay máy nâng lên hạ xuống. + Động cơ 2 điều khiển đóng mở cơ cấu gắp. Khởi động chương trình Xoay động cơ SERVO (5, 150) Goc_xoay = 90 Repeat 5 Xoay động cơ SERVO (6, 0) Đợi 0.5 giây While Goc_xoay < 150 Goc_xoay = Goc_xoay + 2 Xoay động cơ SERVO (5, Goc_xoay) Đợi 0.05 giây While Goc_xoay > 90 Goc_xoay = Goc_xoay – 2 Xoay động cơ SERVO (5, Goc_xoay) Đợi 0.05 giây Đợi 0.5 giây Xoay động cơ SERVO (cổng 6, 90)
- Hai câu lệnh Đợi 0.5 giây được thêm vào với mục đích điều khiển rô-bốt tạm dừng lại ở một số hoạt động để người sử dụng dễ quan sát hơn. Cụ thể như sau: + Câu lệnh Đợi 0.5 giây ở vị trí thứ nhất giúp rô-bốt tạm ngưng các hoạt động trong 0.5 giây sau khi đóng cơ cấu gắp và chuẩn bị nâng vật lên. + Câu lệnh Đợi 0.5 giây ở vị trí thứ hai giúp rô-bốt tạp ngưng các hoạt động trong 0.5 giây trước khi đóng cơ cấu gắp vật. - Hai lệnh thiết lập tham số ban đầu của động cơ tại cổng 5 và 6 trong chương trình ở Hình 9.6 có thể thay đổi vị trí vì: + Hai lệnh thiết lập vị trí của cánh tay ở góc 90 độ và trạng thái mở của cơ cấu gắp. + Không ảnh hưởng đến các hoạt động được lập trình của toàn bộ cánh tay rô-bốt hai bậc. |
- HOẠT ĐỘNG LUYÊN TẬP
- Mục tiêu: Thông qua hoạt động, HS củng cố kiến thức, kĩ năng đã học.
- Nội dung: GV giao nhiệm vụ cho HS; HS sử dụng kiến thức đã học, thảo luận và thực hiện nhiệm vụ.
- Sản phẩm học tập:
- HS hoàn thành bài tập viết chương trình bằng mã giả lập để điều khiển rô-bốt di chuyển theo cạnh của hình vuông cho trước theo chiều ngược kim đồng hồ.
- Câu trả lời của HS về sự khác biệt cơ bản giữa lập trình động cơ DC và động cơ servo.
- Tổ chức hoạt động:
Bước 1: GV chuyển giao nhiệm vụ học tập
- GV giao nhiệm vụ cho HS:
+ Em hãy viết chương trình bằng mã giả lập để điều khiển rô-bốt di chuyển theo cạnh của hình vuông cho trước theo chiều ngược kim đồng hồ.
+ Em hãy nêu sự khác biệt cơ bản giữa lập trình động cơ DC và động cơ servo.
Bước 2: HS thực hiện nhiệm vụ học tập
- HS tiếp nhận, thực hiện nhiệm vụ, thảo luận, đưa ra câu trả lời
- GV quan sát quá trình HS thảo luận, hỗ trợ khi HS cần.
Bước 3: Báo cáo kết quả hoạt động và thảo luận
Câu 1. Chương trình viết bằng pseudocode giúp điều khiển rô-bốt di chuyển theo cạnh của hình vuông cho trước như sau:
Khởi động chương trình
Đi thẳng (150)
Đợi 2 giây
Xoay trái (100)
Đợi 0.5 giây
Đi thẳng (150)
Đợi 2 giây
Xoay trái (100)
Đợi 0.5 giây
Đi thẳng (150)
Đợi 2 giây
Dừng lại
Câu 2.
- Động cơ servo có thể lập trình điều khiển được góc xoay trong khi động cơ DC không lập trình điều khiển được chính xác góc xoay.
- Động cơ servo không thể lập trình điều khiển được tốc độ xoay trong khi động cơ DC có tham số để lập trình điều khiển được tốc độ xoay.
Bước 4: Đánh giá kết quả, thực hiện nhiệm vụ học tập
- GV nhận xét, đánh giá, chuẩn kiến thức.
- HOẠT ĐỘNG VẬN DỤNG
- Mục tiêu: Thông qua hoạt động, HS củng cố kiến thức, kĩ năng đã học.
- Nội dung: GV giao nhiệm vụ cho HS; HS sử dụng kiến thức đã học, kiến thức thực tế. thảo luận và thực hiện nhiệm vụ.
- Sản phẩm học tập:
- HS hoàn thành bài tập về viết lại các chương trình điều khiển rô-bốt chuyển động được giới thiệu trong bài, sử dụng lệnh điều khiển từng động cơ M1, M2.
- HS tìm tìm hiểu được các kiểu kết nối ứng dụng khác của cánh tay rô-bốt hai bậc
- Tổ chức hoạt động:
Bước 1: GV chuyển giao nhiệm vụ học tập
- GV giao nhiệm vụ cho HS:
+ Em hãy viết lại các chương trình điều khiển rô-bốt chuyển động được giới thiệu trong bài, sử dụng lệnh điều khiển từng động cơ M1, M2.
+ Em hãy tìm hiểu thêm các kiểu kết nối ứng dụng khác của cánh tay rô-bốt hai bậc.
Bước 2: HS thực hiện nhiệm vụ học tập
- HS tiếp nhận, thực hiện nhiệm vụ, thảo luận, đưa ra câu trả lời.
- GV quan sát quá trình HS thảo luận, hỗ trợ khi HS cần.
Bước 3: Báo cáo kết quả hoạt động và thảo luận
Câu 1.
Ví dụ 1:
Bắt đầu chương trình
Xoay động cơ DC M1 (tiến, 150)
Xoay động cơ DC M2 (tiến, 150)
Đợi 2 giây
Dừng lại
Ví dụ 2:
Bắt đầu chương trình
Xoay động cơ DC M1 (tiến, 150)
Xoay động cơ DC M2 (tiến, 150)
Đợi 2 giây
Xoay động cơ DC M1 (tiến, 0)
Xoay động cơ DC M2 (tiến, 100)
Đợi 0.5 giây
Xoay động cơ DC M1 (tiến, 150)
Xoay động cơ DC M2 (tiến, 150)
Đợi 1.5 giây
Dừng lại
Câu 2. Trong thực tế, cánh tay rô-bốt nhiều bậc được ứng dụng để tự động hóa lắp ráp ô tô trong nhà máy Vinfast thay cho con người. Ngoài ra chúng còn được ứng dụng trong một số công việc như pha cà phê, cầm nắm trong các rô-bốt mô phỏng hình dáng con người,….
Bước 4: Đánh giá kết quả, thực hiện nhiệm vụ học tập
- GV nhận xét, đánh giá, chuẩn kiến thức.
* Hướng dẫn về nhà
- HS ôn lại kiến thức đã học.
- HS tập viết thêm các chương trình lập trình lập trình điều khiển rô-bốt.

Đủ kho tài liệu môn học
=> Tài liệu sẽ được gửi ngay và luôn
Cách tải:
- Bước 1: Chuyển phí vào STK: 1214136868686 - cty Fidutech - MB
- Bước 2: Nhắn tin tới Zalo Fidutech - nhấn vào đây để thông báo và nhận tài liệu
=> Giáo án tin học 10 kết nối tri thức (bản word)
Từ khóa: giáo án chuyên đề học tập định hướng khoa học máy tính 10 sách kết nối tri thức với cuộc sống, giáo án chuyên đề định hướng khoa học máy tính 10 kết nối, giáo án định hướng khoa học máy tính chuyên đề 10 sách KNTTTài liệu giảng dạy môn Tin học THPT