Giáo án điện tử chuyên đề Khoa học máy tính 10 kết nối Ôn tập và Kiểm tra
Tải giáo án điện tử Chuyên đề học tập Tin học 10 - Khoa học máy tính (kết nối tri thức) Ôn tập và Kiểm tra. Bộ giáo án chuyên đề được thiết kế sinh động, đẹp mắt. Thao tác tải về đơn giản, dễ dàng sử dụng và chỉnh sửa. Thầy, cô kéo xuống để xem chi tiết.
Xem: => Giáo án tin học 10 kết nối tri thức (bản word)

Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Định hướng Khoa học máy tính Kết nối tri thức
VUI MỪNG CHÀO ĐÓN CÁC BẠN ĐẾN VỚI BÀI HỌC MỚI!
KHỞI ĐỘNG
Theo em, khi sử dụng
máy tính để lập trình hoặc điều khiển robot có điểm gì không thuận lợi?
HẠN CHẾ
Máy tính to, cồng kềnh khi sử dụng máy tính để lập trình hoặc điều khiển robot.
Thường sử dụng kết nối USB, thông qua dây cáp để kết nối với robot nên bất tiện cho việc thực hiện điều khiển robot từ xa.
ÔN TẬP VÀ KIỂM TRA CHUYÊN ĐỀ
Nhóm 1
Kể tên một số robot giáo dục ở Việt Nam.
Nhóm 2
Trình bày cấu tạo và hoạt động của robot giáo dục.
Nhóm 3
Robot sử dụng những phụ kiện, tiếp nhận điều khiển nào để chuyển tải các thông tin hình ảnh, âm thanh?
Nhóm 4
Kể tên một số phần mềm lập trình điều khiển robot.
Nhóm 5
Vì sao nhóm lệnh lặp vô tận phải đặt ở cuối chương trình?
HOẠT ĐỘNG THEO NHÓM
Một số loại robot giáo dục ở Việt Nam
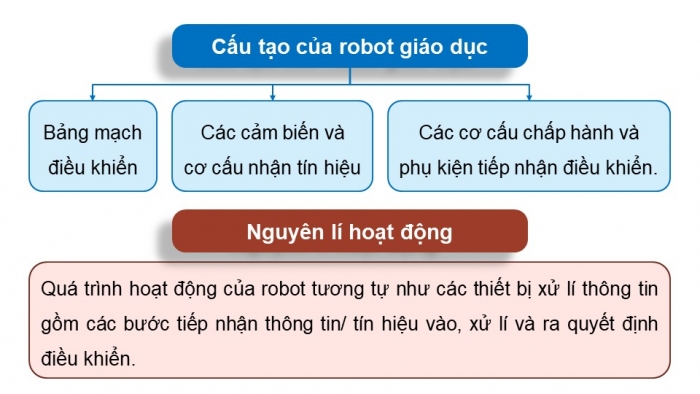
Quá trình hoạt động của robot tương tự như các thiết bị xử lí thông tin gồm các bước tiếp nhận thông tin/ tín hiệu vào, xử lí và ra quyết định điều khiển.
Cấu tạo của robot giáo dục
Bảng mạch điều khiển
Các cảm biến và
cơ cấu nhận tín hiệu
Các cơ cấu chấp hành và
phụ kiện tiếp nhận điều khiển.
Nguyên lí hoạt động
Robot sử dụng những phụ kiện tiếp nhận điều khiển sau để chuyển tải các thông tin âm thanh, hình ảnh
Còi
Màn hình
Một số phần mềm lập trình điều khiển robot
Arduino IDE
Gara Block
KidsCode
Nhóm lệnh lặp vô tận phải đặt ở cuối chương trình vì sau lệnh lặp vô tận sẽ không có lệnh nào có thể thực hiện được nữa.
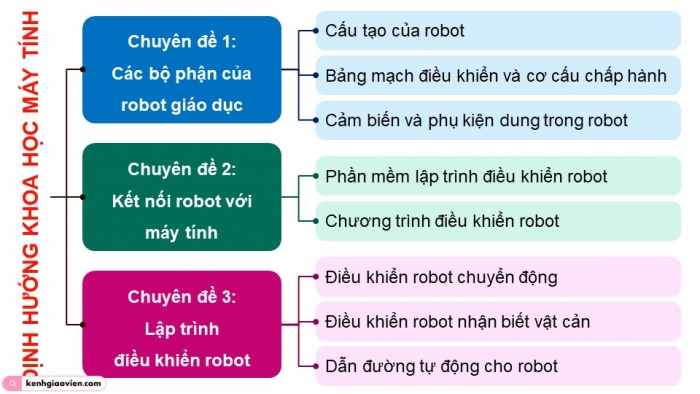
ĐỊNH HƯỚNG KHOA HỌC MÁY TÍNH
Chuyên đề 1:
Các bộ phận của robot giáo dục
Chuyên đề 2:
Kết nối robot với máy tính
Chuyên đề 3:
Lập trình
điều khiển robot
Cấu tạo của robot
Bảng mạch điều khiển và cơ cấu chấp hành
Cảm biến và phụ kiện dung trong robot
Phần mềm lập trình điều khiển robot
Chương trình điều khiển robot
Điều khiển robot chuyển động
Điều khiển robot nhận biết vật cản
Dẫn đường tự động cho robot
LUYỆN TẬP – VẬN DỤNG
Câu 1: Kết nối USB là kết nối có dây hay không dây?
Câu 2: Để điều khiển robot di chuyển theo một đường thẳng đã được vạch sẵn thì cần dùng cảm biến hay cơ cấu chấp hành nào?
A. Cảm biến siêu âm
B. Cảm biến dò đường
C. Động cơ DC
Có dây
Câu 3: Chọn đúng/sai. Nếu sai, hãy sửa lại cho đúng.
A. Để robot hoạt động linh hoạt, ta phải lập trình điều khiển nó.
B. Robot nhận tín hiệu bên ngoài thông qua các lệnh nhận tín hiệu cảm biến đặt trong nhóm lệnh lặp hữu hạn của chương trình.
C. Một số ngôn ngữ lập trình phổ biến hiện nay là C/C++, Scratch, Python...
D. Robot hút bụi sử dụng cảm biến siêu âm để cảm nhận vật cản.
Robot nhận tín hiệu bên ngoài thông qua các lệnh nhận tín hiệu cảm biến đặt trong nhóm lệnh lặp vô hạn của chương trình.
Câu 4: Em hãy phân loại các bộ phận trong robot thành hai loại.
Phần cơ khí
Phần điện, điện tử
Câu 5: Cảm biến siêu âm đo khoảng cách bằng cách ghi nhận khoảng thời gian t (giây) từ lúc phát xung siêu âm đến lúc thu được xung phản xạ (như hình vẽ). Em hãy nêu công thức tính khoảng cách từ robot đến vật cản theo t. Biết rằng, xung siêu âm, xung phản xạ là sóng âm có tốc độ trong không khí là 340 m/s. Coi khoảng cách từ robot đến vật cản xấp xỉ bằng quãng đường đi của xung phát hoặc xung phản xạ.
Gợi ý
Câu 6: Có một động cơ điện một chiều hoạt động ở điện áp trong khoảng 3V đến 9V. Cần sử dụng bao nhiêu viên pin AA (1,5V) và kết nối chúng như thế nào để làm nguồn điện cho động cơ?
Cần sử dụng 2 đến 6 viên pin (1,5V) mặc nối tiếp để làm nguồn điện cho động cơ.
Câu 7: Robot nhận tín hiệu bên ngoài như thế nào? Em hãy trình bày cơ chế nhận các thông tin đó.
Robot nhận tín hiệu từ bên ngoài thông qua các lệnh nhận tín hiệu cảm biến đặt trong nhóm lệnh lặp vô tận của chương trình.
Câu 8: Em hãy viết chương trình điều khiển từ A đến B, sau đó quay trái và đi đến C rồi dừng lại. Đặt robot tại vị trí A hướng về B (như hình vẽ)
--------------- Còn tiếp ---------------
Trên chỉ là 1 phần của giáo án. Giáo án khi tải về có đầy đủ nội dung của bài. Đủ nội dung của học kì I + học kì II
Đủ kho tài liệu môn học
=> Tài liệu sẽ được gửi ngay và luôn
Cách tải:
- Bước 1: Chuyển phí vào STK: 1214136868686 - cty Fidutech - MB
- Bước 2: Nhắn tin tới Zalo Fidutech - nhấn vào đây để thông báo và nhận tài liệu
Xem toàn bộ: Giáo án điện tử chuyên đề Tin học 10 - Định hướng Khoa học máy tính Kết nối tri thức