Giáo án chuyên đề tin học 10 khoa học máy tính kết nối bài 4: Thực hành lắp ráp robot hoàn chỉnh
Giáo án chuyên đề bài 4: Thực hành lắp ráp robot hoàn chỉnh sách chuyên đề học tập tin học 10 khoa học máy tinh kết nối. Giáo án chuyên đề bản word, trình bày rõ ràng cụ thể giúp giáo viên hướng dẫn học sinh mở rộng kiến thức sinh học phổ thông, phát triển năng lực, nâng cao khả năng định hướng nghệ nghiệp sau này. Thao tác tải về rất đơn giản, mời quý thầy cô tham khảo
Xem: => Giáo án tin học 10 kết nối tri thức (bản word)
Click vào ảnh dưới đây để xem 1 phần giáo án rõ nét

Xem video về mẫu Giáo án chuyên đề tin học 10 khoa học máy tính kết nối bài 4: Thực hành lắp ráp robot hoàn chỉnh
Xem toàn bộ: Giáo án chuyên đề Khoa học máy tính 10 kết nối tri thức đủ cả năm
Ngày soạn: …/…/…
Ngày dạy: …/…/…
BÀI 4: THỰC HÀNH: LẮP RÁP ROBOT HOÀN CHỈNH (4 TIẾT)
- MỤC TIÊU
- Kiến thức
Sau bài học này, HS sẽ:
- Biết cách lắp ráp mô hình robot dạng xe cơ bản.
- Biết cách và thực hiện được kết nối một số phụ kiện tiếp nhận điều khiển với robot mức cơ bản.
- Kiểm tra được tình trạng sẵn sàng hoạt động của robot.
- Năng lực
- Năng lực chung:
- Giải quyết được những nhiệm vụ học tập một cách độc lập, theo nhóm và thể hiện sự sáng tạo.
- Góp phần phát triển năng lực giao tiếp và hợp tác qua hoạt động nhóm và trao đổi công việc với giáo viên.
- Năng lực riêng:
- Đây là bài thực hành lắp ráp, kết nối và thử nghiệm với bảng mạch điện đầu tiên. HS cần hoàn thành được các nhiệm vụ thông qua hoạt động lắp ráp, kết nối và thử nghiệm. Trong quá trình thực hiện, HS được phát triển năng lực giải quyết vấn đề và kĩ năng lắp ráp, kết nối bảng mạch điều khiển với động cơ, pin và các cảm biến.
- Phẩm chất
- HS có thái độ tự giác, hợp tác khi thực hành theo nhóm.
- HS tôn trọng và tuyệt đối thực hiện các yêu cầu, quy tắc an toàn khi thực hành.
- THIẾT BỊ DẠY HỌC VÀ HỌC LIỆU
- Đối với giáo viên
- Sách chuyên đề học tập Định hướng khoa học máy tính 10, SGV, Kế hoạch bài dạy.
- Các bộ dụng cụ học tập trong đó có các linh kiện để HS thực hiện nhiệm vụ lắp ráp và kết nối. Số lượng bộ dụng cụ chuẩn bị tùy thuộc vào số nhóm HS.
- Bảng tiêu chí đánh giá các nhóm HS khi hoàn thành nhiệm vụ.
- Máy tính, máy chiếu (nếu có).
- Đối với học sinh: Sách chuyên đề học tập Định hướng khoa học máy tính 10, vở ghi, bút.
III. TIẾN TRÌNH DẠY HỌC
- HOẠT ĐỘNG KHỞI ĐỘNG
- Mục tiêu:
- HS ôn tập lại khái niệm về robot giáo dục.
- Tạo tâm thế vui vẻ, hứng khởi cho HS trước khi vào bài thực hành.
- Nội dung: HS trả lời câu hỏi kiểm tra bài cũ.
- Sản phẩm học tập: HS trả lời câu hỏi dựa vào kiến thức đã học.
- Tổ chức thực hiện:
Bước 1: GV chuyển giao nhiệm vụ:
- GV đặt câu hỏi: Robot giáo dục là gì? Kể tên một số robot giáo dục phổ biến hiện nay ở Việt Nam.
Bước 2: HS thực hiện nhiệm vụ học tập: HS chú ý theo dõi, suy nghĩ câu trả lời.
Bước 3: Báo cáo kết quả hoạt động, thảo luận: HS nhớ lại kiến thức đã học để đưa ra câu trả lời, HS khác nhận xét bổ sung.
- Robot giáo dục là loại robot được thiết kế phục vụ mục đích giáo dục, giúp học sinh hiểu và thực hành những kiến thức kĩ năng về cơ khí, điện tử và điều khiển tự động.
- Một số loại robot giáo dục phổ biến: robot mBot, robot G-Robot, robot KCBot...
Bước 4: Đánh giá kết quả thực hiện: GV nhận xét câu trả lời của HS, trên cơ sơ đó dẫn dắt vào bài học:
Trong bài học ngày hôm nay, chúng ta sẽ cùng nhau thực hành lắp ráp mô hình, kết nối pin, động cơ, cảm biến với bảng mạch điều khiển và chạy thử nghiệm chương trình mẫu với bộ dụng cụ G-Robot Creator – Bài 4: Thực hành: Lắp ráp robot hoàn chỉnh.
- HOẠT ĐỘNG HÌNH THÀNH KIẾN THỨC
Hoạt động 1: Lắp ráp mô hình xe cơ bản
- Mục tiêu: HS lắp ráp được mô hình robot dạng xe cơ bản (gọi tắt là mô hình xe cơ bản), các bộ phận được lắp ráp đúng quy định.
- Nội dung: Ở phần thực hành này, mỗi nhóm HS sẽ làm việc nhóm để cùng nhau lắp ráp mô hình xe cơ bản, GV tổ chức cho HS thực hành lắp ráp theo từng bước hướng dẫn trong SGK.
- Sản phẩm học tập: HS hoàn thành lắp ráp mô hình xe cơ bản, các bộ phận được lắp ráp đúng quy định.
- Tổ chức hoạt động:
HOẠT ĐỘNG CỦA GIÁO VIÊN - HỌC SINH | DỰ KIẾN SẢN PHẨM |
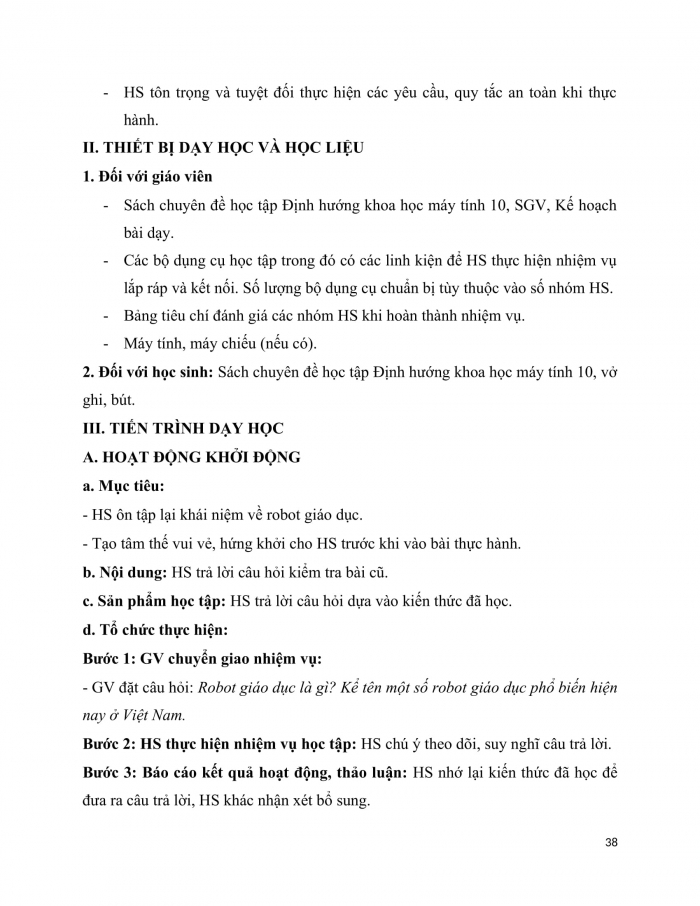
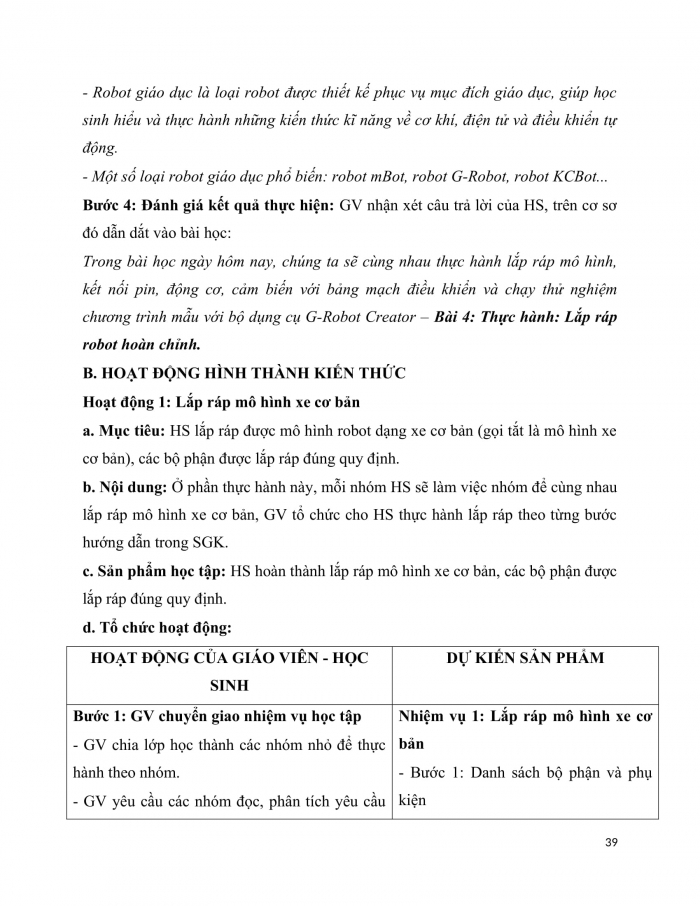
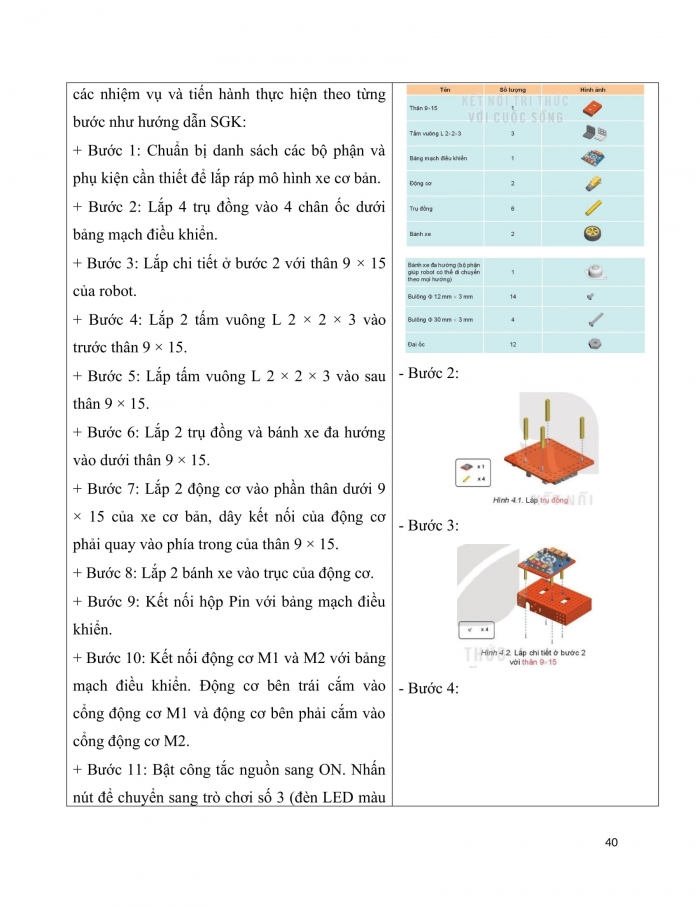
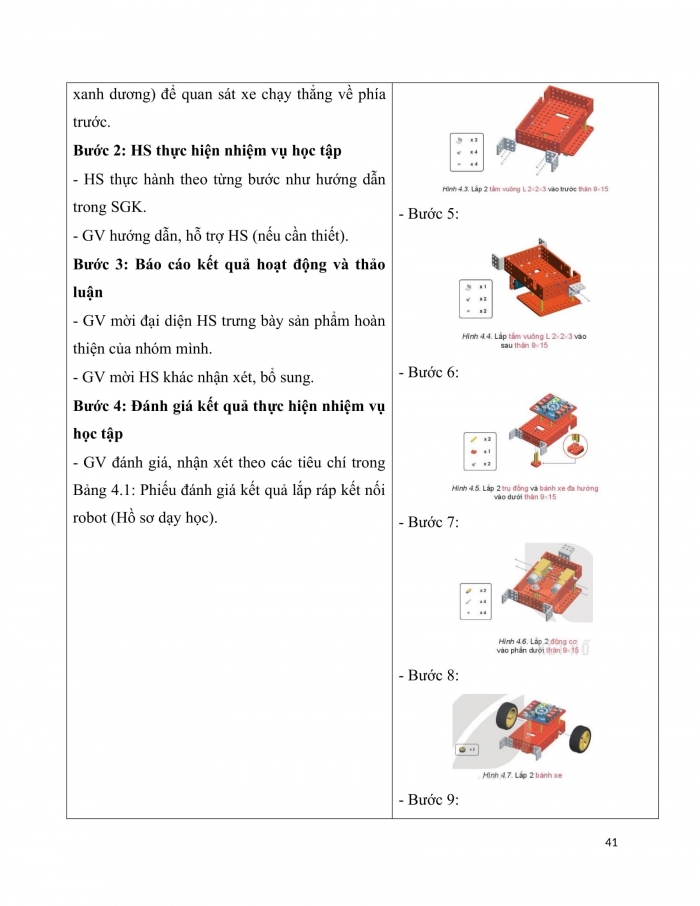
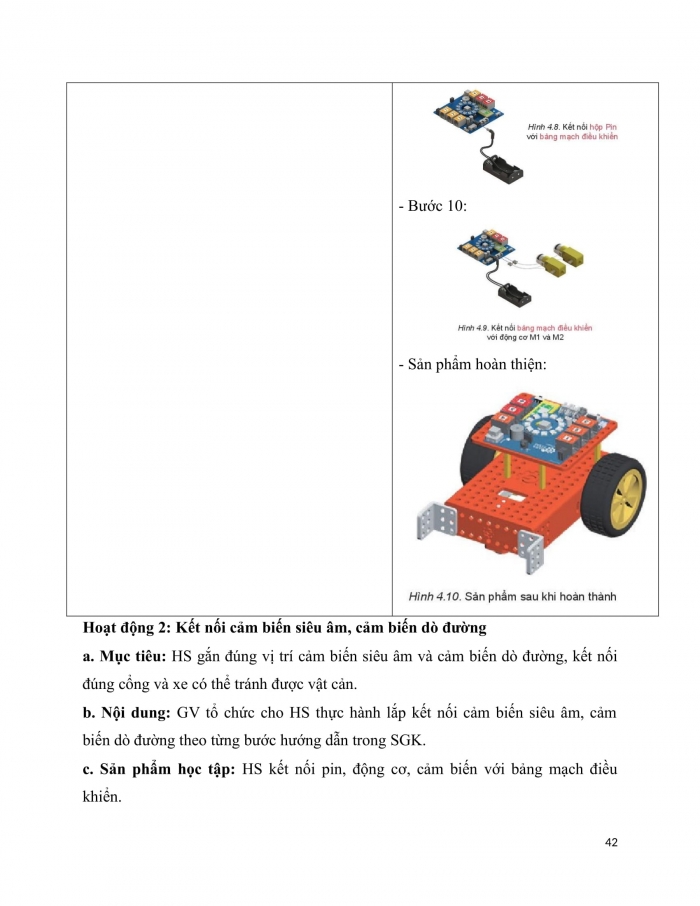
Bước 1: GV chuyển giao nhiệm vụ học tập - GV chia lớp học thành các nhóm nhỏ để thực hành theo nhóm. - GV yêu cầu các nhóm đọc, phân tích yêu cầu các nhiệm vụ và tiến hành thực hiện theo từng bước như hướng dẫn SGK: + Bước 1: Chuẩn bị danh sách các bộ phận và phụ kiện cần thiết để lắp ráp mô hình xe cơ bản. + Bước 2: Lắp 4 trụ đồng vào 4 chân ốc dưới bảng mạch điều khiển. + Bước 3: Lắp chi tiết ở bước 2 với thân 9 × 15 của robot. + Bước 4: Lắp 2 tấm vuông L 2 × 2 × 3 vào trước thân 9 × 15. + Bước 5: Lắp tấm vuông L 2 × 2 × 3 vào sau thân 9 × 15. + Bước 6: Lắp 2 trụ đồng và bánh xe đa hướng vào dưới thân 9 × 15. + Bước 7: Lắp 2 động cơ vào phần thân dưới 9 × 15 của xe cơ bản, dây kết nối của động cơ phải quay vào phía trong của thân 9 × 15. + Bước 8: Lắp 2 bánh xe vào trục của động cơ. + Bước 9: Kết nối hộp Pin với bảng mạch điều khiển. + Bước 10: Kết nối động cơ M1 và M2 với bảng mạch điều khiển. Động cơ bên trái cắm vào cổng động cơ M1 và động cơ bên phải cắm vào cổng động cơ M2. + Bước 11: Bật công tắc nguồn sang ON. Nhấn nút để chuyển sang trò chơi số 3 (đèn LED màu xanh dương) để quan sát xe chạy thẳng về phía trước. Bước 2: HS thực hiện nhiệm vụ học tập - HS thực hành theo từng bước như hướng dẫn trong SGK. - GV hướng dẫn, hỗ trợ HS (nếu cần thiết). Bước 3: Báo cáo kết quả hoạt động và thảo luận - GV mời đại diện HS trưng bày sản phẩm hoàn thiện của nhóm mình. - GV mời HS khác nhận xét, bổ sung. Bước 4: Đánh giá kết quả thực hiện nhiệm vụ học tập - GV đánh giá, nhận xét theo các tiêu chí trong Bảng 4.1: Phiếu đánh giá kết quả lắp ráp kết nối robot (Hồ sơ dạy học). | Nhiệm vụ 1: Lắp ráp mô hình xe cơ bản - Bước 1: Danh sách bộ phận và phụ kiện - Bước 2: - Bước 3: - Bước 4: - Bước 5: - Bước 6: - Bước 7: - Bước 8: - Bước 9: - Bước 10: - Sản phẩm hoàn thiện: |
Hoạt động 2: Kết nối cảm biến siêu âm, cảm biến dò đường
- Mục tiêu: HS gắn đúng vị trí cảm biến siêu âm và cảm biến dò đường, kết nối đúng cổng và xe có thể tránh được vật cản.
- Nội dung: GV tổ chức cho HS thực hành lắp kết nối cảm biến siêu âm, cảm biến dò đường theo từng bước hướng dẫn trong SGK.
- Sản phẩm học tập: HS kết nối pin, động cơ, cảm biến với bảng mạch điều khiển.
- Tổ chức hoạt động:
HOẠT ĐỘNG CỦA GIÁO VIÊN - HỌC SINH | DỰ KIẾN SẢN PHẨM |
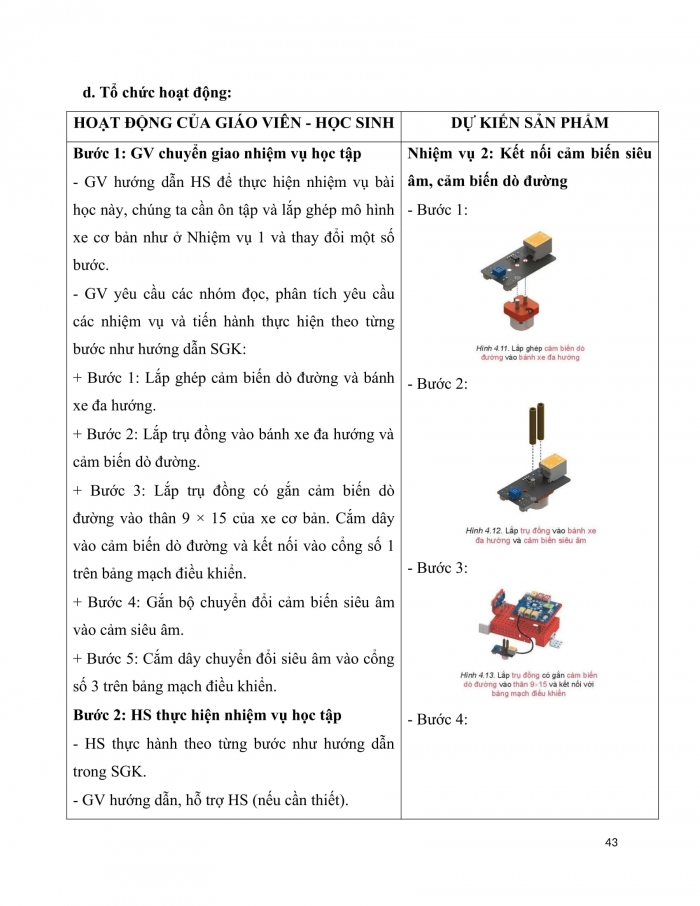
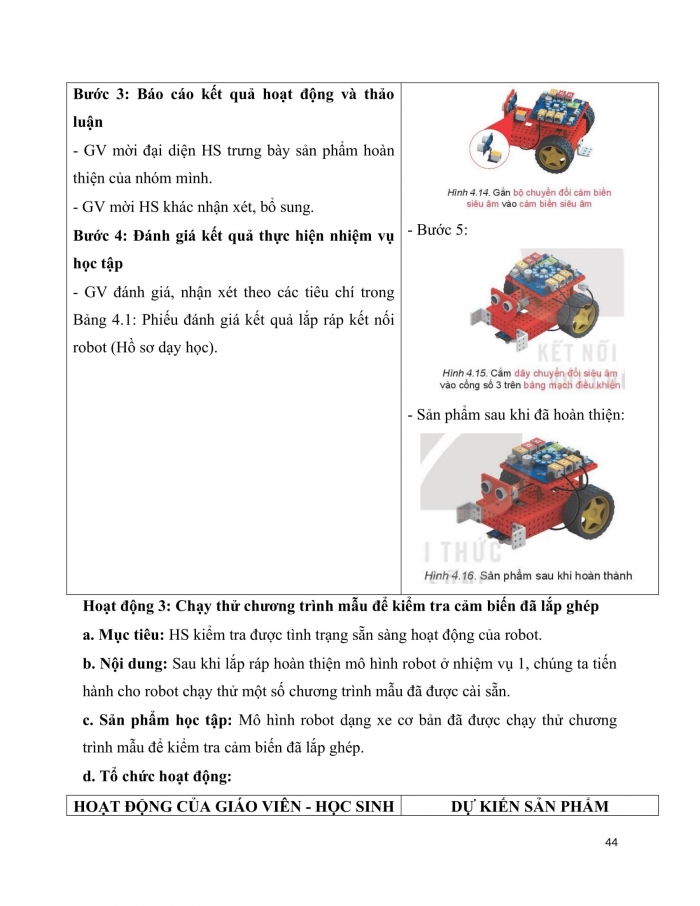
Bước 1: GV chuyển giao nhiệm vụ học tập - GV hướng dẫn HS để thực hiện nhiệm vụ bài học này, chúng ta cần ôn tập và lắp ghép mô hình xe cơ bản như ở Nhiệm vụ 1 và thay đổi một số bước. - GV yêu cầu các nhóm đọc, phân tích yêu cầu các nhiệm vụ và tiến hành thực hiện theo từng bước như hướng dẫn SGK: + Bước 1: Lắp ghép cảm biến dò đường và bánh xe đa hướng. + Bước 2: Lắp trụ đồng vào bánh xe đa hướng và cảm biến dò đường. + Bước 3: Lắp trụ đồng có gắn cảm biến dò đường vào thân 9 × 15 của xe cơ bản. Cắm dây vào cảm biến dò đường và kết nối vào cổng số 1 trên bảng mạch điều khiển. + Bước 4: Gắn bộ chuyển đổi cảm biến siêu âm vào cảm siêu âm. + Bước 5: Cắm dây chuyển đổi siêu âm vào cổng số 3 trên bảng mạch điều khiển. Bước 2: HS thực hiện nhiệm vụ học tập - HS thực hành theo từng bước như hướng dẫn trong SGK. - GV hướng dẫn, hỗ trợ HS (nếu cần thiết). Bước 3: Báo cáo kết quả hoạt động và thảo luận - GV mời đại diện HS trưng bày sản phẩm hoàn thiện của nhóm mình. - GV mời HS khác nhận xét, bổ sung. Bước 4: Đánh giá kết quả thực hiện nhiệm vụ học tập - GV đánh giá, nhận xét theo các tiêu chí trong Bảng 4.1: Phiếu đánh giá kết quả lắp ráp kết nối robot (Hồ sơ dạy học). | Nhiệm vụ 2: Kết nối cảm biến siêu âm, cảm biến dò đường - Bước 1: - Bước 2: - Bước 3: - Bước 4: - Bước 5: - Sản phẩm sau khi đã hoàn thiện: |
Hoạt động 3: Chạy thử chương trình mẫu để kiểm tra cảm biến đã lắp ghép
- Mục tiêu: HS kiểm tra được tình trạng sẵn sàng hoạt động của robot.
- Nội dung: Sau khi lắp ráp hoàn thiện mô hình robot ở nhiệm vụ 1, chúng ta tiến hành cho robot chạy thử một số chương trình mẫu đã được cài sẵn.
- Sản phẩm học tập: Mô hình robot dạng xe cơ bản đã được chạy thử chương trình mẫu để kiểm tra cảm biến đã lắp ghép.
- Tổ chức hoạt động:
HOẠT ĐỘNG CỦA GIÁO VIÊN - HỌC SINH | DỰ KIẾN SẢN PHẨM |
Bước 1: GV chuyển giao nhiệm vụ học tập - GV yêu cầu các nhóm đọc, phân tích yêu cầu các nhiệm vụ và tiến hành thực hiện theo từng bước như hướng dẫn SGK. - GV cho HS bắt đầu từ chương trình mẫu 1 (kích hoạt còi và hiệu ứng đèn LED): + Bước 1: Nhấn giữ nút chuyển chế độ ở giữa bảng mạch điều khiển và đồng thời nhấn nút khởi động lại ở góc trên bên phải của bảng mạch điều khiển. + Bước 2: Sau khi nhấn nút khởi động lại, vẫn tiếp tục giữ nút chuyển chế độ trong 5 giây cho đến khi tất cả các đèn LED của vòng LED đều chuyển sang màu hồng rồi tắt hết chỉ còn lại một đèn LED sáng màu hồng. - GV tiếp tục cho HS chạy thử chương trình mẫu 2 (Robot tự động di chuyển tránh vật cản): + Bước 1: Nhấn giữ nút chuyển chế độ ở giữa bảng mạch điều khiển và đồng thời nhấn nút khởi động lại ở góc trên bên phải của bảng mạch điều khiển. + Bước 2: Sau khi nhấn nút khởi động lại, vẫn tiếp tục giữ nút chuyển chế độ trong 5 giây cho đến khi tất cả các đèn LED của vòng LED đều chuyển sang màu hồng rồi tắt hết chỉ còn lại một đèn LED sáng màu hồng, nhấn tiếp nút chế độ để sáng thêm một đèn LED màu hồng. Bước 2: HS thực hiện nhiệm vụ học tập - HS thực hành theo từng bước như hướng dẫn trong SGK. - GV hướng dẫn, hỗ trợ HS (nếu cần thiết). Bước 3: Báo cáo kết quả hoạt động và thảo luận - GV mời đại diện HS trưng bày sản phẩm hoàn thiện của nhóm mình. - GV mời HS khác nhận xét, bổ sung. Bước 4: Đánh giá kết quả thực hiện nhiệm vụ học tập - GV đánh giá, nhận xét theo các tiêu chí trong Bảng 4.1: Phiếu đánh giá kết quả lắp ráp kết nối robot (Hồ sơ dạy học). - GV nhận xét chung, khen ngợi quá trình làm việc và kết quả thực hành điều khiển robot của các nhóm, rút kinh nghiệm cho các nhóm chưa hoàn thành tốt yêu cầu kèm theo các minh chứng tương ứng. | Nhiệm vụ 3: Chạy thử chương trình mẫu để kiểm tra cảm biến đã lắp ghép - Chương trình mẫu 1: Kết quả: Còi trên bảng mạch điều khiển phát ra âm thanh theo nhịp điệu của còi báo động. Các đền LED lần lượt sáng, tắt theo hiệu ứng xoay vòng. - Chương trình mẫu 2: Kết quả: Robot tự động di chuyển và tránh được vật cản nhờ cảm biến siêu âm. |
- HOẠT ĐỘNG LUYỆN TẬP
- Mục tiêu: HS được củng cố kiến thức về các bộ phận của robot giáo dục.
- Nội dung: HS dựa vào các kiến thức đã học để trả lời câu hỏi.
- Sản phẩm học tập: Bài làm của học sinh, kĩ năng giải quyết nhiệm vụ học tập.
- Tổ chức hoạt động:
Bước 1: GV chuyển giao nhiệm vụ học tập
- GV yêu cầu HS hoạt động nhóm đôi, hoàn thành các bài tập 1, 2 phần Luyện tập (SCĐ - tr.24):
Bài 1. Nếu thiếu một trong hai bước kết nối động cơ hoặc kết nối pin vào bảng mạch điều khiển thì xe có hoạt động được không? Vì sao?
Bài 2. Động cơ trái và phải được gắn vào vị trí nào của bảng mạch điều khiển?
Bước 2: HS thực hiện nhiệm vụ học tập
- HS thảo luận nhóm đôi, thực hiện nhiệm vụ.
- GV hướng dẫn, hỗ trợ HS (nếu cần thiết).
Bước 3: Báo cáo kết quả hoạt động và thảo luận
- GV gọi đại diện HS trình bày kết quả.
- HS khác lắng nghe, nhận xét, chỉnh sửa.
Kết quả:
Bài 1. Xe không hoạt động được. Vì động cơ là cơ cấu chấp hành giúp xe có thể di chuyển bằng cách kết hợp và làm quay bánh xe thông qua trục động cơ. Pin là nguồn năng lượng cần phải cung cấp cho bảng mạch điều khiển để điều khiển xe hoạt động.
Bài 2. Các cổng gắn động cơ nằm bên phải của cổng kết nối nguồn pin. Động cơ trái gắn vào cổng M1, động cơ phải gắn vào cổng M2.
Bước 4: Đánh giá kết quả thực hiện nhiệm vụ học tập
- GV đánh giá, nhận xét, chuẩn kiến thức.
- HOẠT ĐỘNG VẬN DỤNG
- Mục tiêu: Vận dụng các kiến thức vừa học quyết các vấn đề học tập và thực tiễn.
- Nội dung: HS vận dụng kiến thức, trả lời câu hỏi.
- Sản phẩm học tập: Bài làm của học sinh, kĩ năng giải quyết nhiệm vụ học tập.
- Tổ chức hoạt động:
Bước 1: GV chuyển giao nhiệm vụ học tập
- GV yêu cầu HS hoàn thành các bài tập phần Vận dụng (SCĐ - tr.24) theo nhóm đôi:
Em hãy lắp cảm biến dò đường theo một cách khác và tiến hành hiệu chỉnh biến trở để cảm biến dò đường hoạt động tốt.
Bước 2: HS thực hiện nhiệm vụ học tập
- HS trao đổi theo nhóm, thực hiện nhiệm vụ.
- GV hướng dẫn, hỗ trợ HS (nếu cần thiết).
Bước 3: Báo cáo kết quả hoạt động và thảo luận
- HS xung phong trình bày kết quả.
- HS khác lắng nghe, nhận xét, chỉnh sửa.
Kết quả:
Sử dụng các phụ kiện bổ trợ lắp ráp khác (các tấm nhựa có trong bọ dụng cụ G-Robot) để thay đổi vị trí gắn cảm biến dò đường. Cách hiệu chỉnh biến trở của cảm biến dò đường như sau: Đặt hai mắt của cảm biến dò đường (đã gắn bánh xe đa hướng và trụ đồng) vào vùng màu đen (bánh xe đa hướng chạm với mặt phẳng của vùng màu đen). Sau đó, tiến hành vặn biến trở cho đến khi cả hai đèn tín hiệu vừa tắt hết thì dừng lại.
Lưu ý:
- Vặn biến trở theo chiều kim đồng hồ để giảm sự tương phản sáng tối (tăng độ nhạy) của hai mắt tín hiệu).
- Vặn biến trở ngược chiều kim đồng hồ để tăng sự tương phản sáng tối (giảm độ nhạy của hai mắt tín hiệu).
Bước 4: Đánh giá kết quả thực hiện nhiệm vụ học tập
- GV đánh giá, nhận xét, chuẩn kiến thức.
HỒ SƠ DẠY HỌC: Đánh giá hoạt động thực hành
- Hướng dẫn đánh giá: Việc đánh giá hoạt động thực hành của HS được chia thành hai nội dung: đánh giá kết quả thực hiện 3 nhiệm vụ và đánh gái hoạt động làm việc nhóm. HS tiến hành tự đánh giá và đánh giá các thành viên còn lại cùng nhóm của mình để cho ra một đầu điểm, kí hiệu là DiemHS. GV tiến hành đánh giá để có đầu điểm thứ hai, kí hiệu là DiemGV. Điểm kết luận cho mỗi HS được tổ hợp từ hai đầu điểm với trọng số tùy GV quyết định. Ví dụ có thể tính theo công thức: (0,7 × DiemGV + 0,3 × DiemHS).
- Gợi ý tiêu chí đánh giá: GV đánh giá kết quả lắp ráp kết nối robot của các nhóm HS theo các tiêu chí trong Bảng 4.1.
Bảng 4.1: Phiếu đánh giá kết quả lắp ráp kết nối robot
STT | Các tiêu chí đánh giá (Điểm tối đa cho mỗi nhiệm vụ là 10 điểm) | Điểm từng nhiệm vụ |
1 | Nhiệm vụ 1: - Bước 1: Chuẩn bị đầy đủ các linh kiện theo danh sách (1 điểm). - Bước 2, 3: Lắp chính xác 4 trụ đồng vào bản mạch chính và lắp đúng chi tiết vào đúng vị trí trên thân (1 điểm). - Bước 4: Lắp 2 tấm vuông L 2 × 2 × 3 vào đúng vị trí trên thân (1 điểm). - Bước 5: Lắp 1 tấm vuông L 2 × 2 × 3 vào đúng vị trí trên thân (1 điểm). - Bước 6: Lắp 2 trụ đồng và bánh xe đa hướng vào đúng vị trí trên thân (1 điểm). - Bước 7: Lắp 2 động cơ vào đúng vị trí trên thân (1 điểm). - Bước 8: Lắp được 2 bánh xe vào trục của động cơ (1 điểm). - Bước 9: Kết nối hộp pin với bảng mạch điều khiển (1 điểm). - Bước 10: Kết nối chính xác 2 động cơ vào bảng mạch điều khiển (1 điểm). - Bước 11: Hoàn thành mô hình và chạy được trò chơi số 3 (1 điểm). |
|
2 | Nhiệm vụ 2: - Bước 1: Lắp cảm biến dò đường vào bánh xe đa hướng (2 điểm). - Bước 2: Lắp trụ đồng vào bánh xe đa hướng và cảm biến dò dường (2 điểm). - Bước 3: Lắp chi tiết ở bước 2 vào thân xe, cắm dây kết nối với cổng số 1 (2 điểm). - Bước 4: Gắn bộ chuyển đổi cảm biến siêu âm vào cảm biến siêu âm (2 điểm). - Bước 5: Cắm dây chuyển đổi siêu âm vào cổng số 3 trên bảng mạch điều khiển (2 điểm). |
|
3 | Nhiệm vụ 3: - Mô hình hoạt động được chương trình mẫu số 1 (5 điểm). - Mô hình hoạt động được chương trình mẫu số 2 (5 điểm). |
|
DiemGV (Là trung bình cộng của 3 đầu điểm trên) |
| |
- HS tự đánh giá hoạt động làm việc nhóm của nhóm mình theo các tiêu chí trong Bảng 4.2.
Bảng 4.2: Phiếu hướng dẫn HS đánh giá hoạt động làm việc nhóm
STT | Tên nhóm | Tổng điểm (tối đa 10 điểm) |
1 | Tên thành viên 1: ... |
|
2 | Tên thành viên 2: ... |
|
3 | Tên thành viên 3: ... |
|
4 | Tên thành viên 4: ... |
|
Các tiêu chí đánh giá (mỗi tiêu chí tối đa 2 điểm): Tiêu chí 1: Mức độ nhiệt tình tham gia làm việc nhóm. Tiêu chí 2: Mức độ hỗ trợ các thành viên khác khi cần thiết. Tiêu chí 3: Mức độ lắng nghe và đóng góp ý kiến. Tiêu chí 4: Mức độ hoàn thành công việc được giao. Tiêu chí 5: Có tinh thần đoàn kết trong nhóm. |
| |
* Hướng dẫn về nhà
- Hoàn thành bài tập vận dụng.
- Đọc và chuẩn bị trước bài sau - Bài 5: Phần mềm lập trình điều khiển robot.
Trên chỉ là 1 phần của giáo án. Giáo án khi tải về có đầy đủ nội dung của bài. Đủ nội dung của học kì I + học kì II
Đủ kho tài liệu môn học
=> Tài liệu sẽ được gửi ngay và luôn
Cách tải:
- Bước 1: Chuyển phí vào STK: 1214136868686 - cty Fidutech - MB
- Bước 2: Nhắn tin tới Zalo Fidutech - nhấn vào đây để thông báo và nhận tài liệu
Xem toàn bộ: Giáo án chuyên đề Khoa học máy tính 10 kết nối tri thức đủ cả năm